日本大百科全書(ニッポニカ) 「つかむ」の意味・わかりやすい解説
つかむ
つかむ / 掴む
攫む
人間の手の働きはさまざまである。たとえば、手ぶりによる表現の機能、口へ食物を運ぶ本能的な機能、異性をいとおしむときの情感的・性的な手の働き、危険から身体を守るためにつくる握りこぶし、そして手は身体のあらゆる部位に届くようになっていて、身体を清潔に保つ働きなどをしている。このように手は人間生活にとって欠くことのできない役割を担っているが、そのなかでもっとも基本的な手の働きは、「触る」感覚機能と、「つかむ」運動機能である。
人間の手は、その手のなかに道具として最高の完全さが具現されていて、他の動物たちや鳥類のように、単に前肢が物を捕捉(ほそく)するための器官であるばかりでなく、道具器官としての働きをもっている。これは、人間の手は母指を他の4本の指のいずれにもあわせる(母指の対立運動という)ことが可能で、これによって完全に「つかむ」ことができるからである。
[内田 謙]
つかむ・つまむ・握るの関係
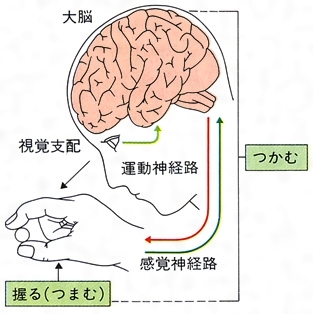
「つかむ」という行為は、ある物体を目で見るか、手で触るかして、あるいはその両者がかかわりあって得た、その物体に関する情報を大脳に送り、大脳のなかで情報処理が行われたうえで、その物体を握り、さらにそれを離すまでの一連の過程をさしている。
手で物を保持するときの手の基本的な運動機能は、母指および他の4本の指の位置の差異、運動の目的によっていくつかに分類できる。
母指が他の指と対立位にあるときの運動に、「つかむ」「つまむ」「握る」がある。ここでいう「つかむ」は狭義の意で、行為ではなく、運動としてとらえた概念である。コップのような円柱形のものを保持したり、ボールのような球状のものを保持したりするときの運動で、4本の指のそれぞれの関節(中手指節関節および指節間関節)を軽く屈曲し、4本の指が母指と対立位にあるときの手の働きである。「つまむ」は、ピンのようなきわめて細い物やボタンのような小さな物を保持するときの運動で、主として人差し指または中指の指先と対立位にある母指の指先との間で物を保持するときの手の働きである。
また「握る」は、ハンマーの柄(え)を保持したり、綱などを強く引いたりするような手の働きで、この場合、4本の指は強い屈曲位にあって、母指はそれらの指の背面にあり、母指で他の指の背面から力を加えることによって手の力を集中することができ、非常に強い力を出すことができる。
手は「第二の脳」であるといわれているが、手が働いているときには、かならず脳も働いているのである。つまり、手が思いどおりに働くためには、脊髄(せきずい)、小脳および大脳が深くかかわりあっている。それぞれの指の相対的な位置関係、位置関係を保つために微妙に作用する筋の協同作用や拮抗(きっこう)作用、手全体のバランス、さらに手のもっている器用さなど、すべての運動は、脊髄、小脳および大脳によって調節されているのである()。
[内田 謙]
「つかむ」仕組み
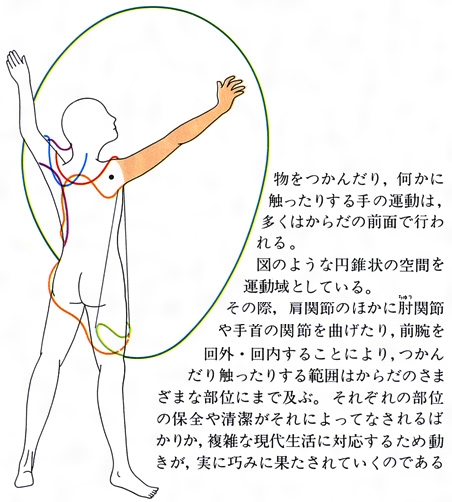
手は、手首(橈(とう)側手根関節)から先(遠位)の部分をさしているが、手の働きが十分に機能するためには、その手を的確な位置に、しかも正確な速さで運んでくれるための支持機能が必要である。この支持機能を担っているのが、肩関節を中心とした上腕や前腕であり、肘(ちゅう)関節および手首の関節である。つまり手の運動は、一般に肩関節を中心とする上肢の描く円錐(えんすい)形で示される前頭面の前面で行われ、同時に視覚の支配下にあって、視覚と共同して手の働きが達成されているのである。したがって、「つかむ」という運動機能を有する効果器としてのおもな働きは、(1)個体の生存に関する摂食行為、(2)排泄(はいせつ)に伴う衛生的な役割、(3)ジェスチュアによる表現行為、(4)仕事をするときの手の動作、に分けられるが、これらの働きは、いずれも支持機能に支えられて行われているのである()。
[内田 謙]
「つかむ」を構成する手のアーチ
日ごろわれわれが手を休めているとき、手の形態はアーチ状をつくっている。このアーチはまた、物を握ったりつまんだりしているときにも現れる。アーチは縦と横との二つがある。手首にある手根骨から、手掌を形づくっている中手骨、および指の指骨の先端に至る長軸に形成される縦のアーチと、5本の指の横断面にみられる手掌側に、ほぼ円弧に近い曲線を描いてつくられる横のアーチとである()。
これらのアーチは、物をつかんだりつまんだりする運動に重要な役割をしている。縦のアーチは、指を曲げたり伸ばしたりする際に働く指の屈筋群と伸筋群との緊張のバランスによって保たれているが、たとえば、これらの筋の運動を支配している神経が麻痺(まひ)すると、縦のアーチの形成ができなくなり、つかむことが困難となる。横のアーチをさらにみていくと、手首にあるアーチと、中手骨と指の骨の関節部位につくられるアーチとがある。手首のアーチは、手根骨が手の掌側で屈筋支帯によって強く結合され、アーチ状をつくる(毛根管)もので、ほとんど固定されている。中手骨のつくるアーチは可動性が大きく、曲率半径の大きいアーチや小さなアーチをつくることができ、つかむ物により自由に適応できるようになっている。
[内田 謙]
重要な母指の働き
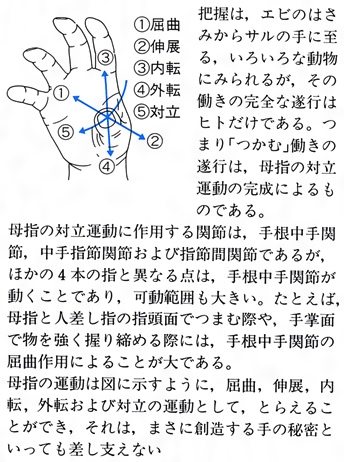
「つかむ」仕組みのなかで、母指はもっとも重要な働きをもち、またもっとも複雑な運動をしている。すでに前に触れたが、詳しくみてみると、母指を除く4本の指の運動は、手を広げたり閉じたりするときの指の開閉(指の外転、内転という)運動と、物を握ったりつまんだりするときに指を曲げたり伸ばしたりする(屈曲、伸展)運動とに分けられる。母指ではこれらの運動に、さらに、他の4本の指のいずれの指とも向き合わせることのできる運動(対立運動)が加わる。この運動は、母指の掌側外転と長軸回転とが同時に行われる複雑な運動で、つかむ運動の重要な働きをしている。
簡単にいうと、物をつかんだり握ったりする運動は、母指の対立運動と4本の指の屈曲運動が組み合わさって行われる運動である。母指と人差し指の指端の間で物をつまむ運動は、母指の内転と人差し指の屈曲の運動が組み合わされたものである。また、つかむ運動でも、つかむ対象物が円柱状のものであるか、球状のものであるかによって、指の運動が異なってくる。
ボールをつかむ場合には、前述の母指の対立運動および他指の屈曲運動のほかに、4本の指の外転運動が参加して行われる。つまり、指を広げる運動と指を曲げる運動に母指の対立運動があわさって行われているのである。このように手の運動は、握ったりつまんだりする対象物によって、運動に働く関節の動きが異なっているのである()。
[内田 謙]
「つかむ」ことと筋の働き
物を握ったりつまんだりする運動は筋(きん)の働きによるものであり、筋の収縮によって筋の長さが変化し、その結果として骨に、てこの作用が生じて行われる。しかも筋の働きには、(1)協同作用、(2)拮抗(きっこう)作用とがあって、運動がスムーズに行われるのである。
(1)の協同作用は、ある関節を曲げようとするときに、その運動に関連する筋群が協同して働き、それぞれの筋がかってに作用することがないような仕組みである。(2)の拮抗作用は、その運動と反対の運動を行うことで、これは、ちょうど屈筋と伸筋の関係にある。物を握り締めるときに働く筋は、指を曲げる屈筋群であるが、その際に、指を伸ばすときに働く伸筋群が、指を曲げる運動と反対の方向に作用して、運動を円滑にしている。
手の運動に作用する筋は、その起始を前腕または上腕にもち、停止をそれぞれの指の骨にもつ前腕筋群と、筋の起始および停止を手のなかにもつ手筋群とである。前腕筋群は大きな運動の際に働き、手筋群は微妙な運動に働く。しかも運動によって、これらの筋のかかわり方が異なってくる。物をつまむ運動は、人差し指をほぼ伸ばしたまま中手指節関節を曲げ、母指との対立運動との組合せによって行われるが、そのときに働く筋は、手筋群のなかの骨間筋や虫様筋である。手を握り締めるような場合や、各指を同時に曲げるときに働く筋は前腕筋群である。
[内田 謙]
物の保持のためにも役だつ皮膚
さらに、物をつかんだり握ったりする場合に重要な役割をしているのが皮膚である。もし皮膚が皮下の組織としっかり結合されていないと、物を安定させて握ることが不可能になる。
皮膚は一般に感覚器の分野で説明されているため、つかんだり握ったりする際の運動機構の一つとして説明されることが少ない。物を強く握り締めたときに、皮膚の移動をコントロールしているのが筋膜である。手掌には、皮膚と筋膜との間に、ちょうどふとんの閉じ糸の役割をしている中隔とよばれる組織がある。この中隔が掌側面や指の皮膚でよく発達しているため、手で物をしっかり握った際に、皮膚が移動して物が滑り落ちないようになっている。また皮膚にはしわや溝があって、運動によって皮膚にたるみがおこらないような構造、たとえば指の関節の掌側には掌側板とよばれる皮膚の折り畳み機構がつくられている。
指のなかには、指の屈曲・伸展および外転・内転などに働く多くの筋(きん)、腱(けん)や神経、血管などが走行するが、運動によってそれらの位置がずれないような、特殊な靭帯(じんたい)が組み込まれている。
[内田 謙]
手の働きと脳
古代ギリシアの最初の科学者といわれるアナクサゴラスは、人間は手を使うことによってのみ動物たちに勝っていると述べているが、人間は手を使うことによって、大脳の発達を促したのである。手で物をつかみ、その物の硬さや軟らかさ、大きさなどによって、手で握り締める強さを加減(筋収縮の抑制)したり、その加減の程度を判断したりするような精神作業を営むのが中枢神経系、大脳、小脳および脊髄などである。
中枢神経系は、外界からの情報を、光、音、触、温度あるいは化学物質に反応する外受容器(目、耳、皮膚感覚など)を介して受け取る。体内の変化は内受容器、つまり固有受容器(深部感覚受容器および平衡感覚受容器)を通して受け取る。中枢神経系は、それらの受容器からのいろいろな情報を解釈し、処理して、その結果を筋の運動に変換するようになっている。
[内田 謙]
手の運動神経路と知覚神経路
手の働きをつかさどる神経の経路には、運動神経路と知覚神経路とがある。たとえば卵や紙コップなどをつかむ場合に、その卵や紙コップの硬さ・軟らかさは、知覚神経路を介して大脳にその情報が送られ、その情報に基づいて大脳から運動神経路を通して、つかんだり握ったりするための運動をおこすように、筋群に指令が伝えられる。あまり強く握って、卵や紙コップがつぶれてしまわないように、筋収縮の望ましい速度と力をコントロールしているのが小脳である。
[内田 謙]
小脳の制御機構
小脳は、手で物に触ったり(求心性)、握ったり(遠心性)する際に不可欠な働きをしている。小脳は、大脳皮質にある運動領をはじめ、皮膚、関節、筋および目などから神経線維を受け入れていて、あらゆる運動を基本的に調整する役割を果たしているのである。物をつかもうとする運動は、大脳にある運動領皮質から筋に送られる神経パルス、つまり筋の収縮・弛緩(しかん)の指令情報によって行われるが、この情報は小脳にも送られる。大脳皮質において意図された運動と実際に行われている運動とが異なっていれば、その誤りを修正するのが小脳である()。
たとえば、手を伸ばして物をつかむ場合に、腕が早く動きすぎて、手が目標物を行き過ぎようとしている情報が、関節や筋などの受容器である筋紡錘やゴルジ腱器官、皮膚感覚器官から小脳に送られると、その動きをコントロールして、目標物から手が行き過ぎるのを防いでいるのであって、小脳は制御機構としての役割を果たしているのである。
イギリスの外科医で解剖学者のベルCharles Bell(1774―1842)は「人間の手のうちにこそ、道具の最高の完全さが実現されている」と述べている。この完全さは、手に備わっている運動の力、多様性、拡大、速さなど統一性をもった手の諸特性を意味するが、前に述べたように中枢神経系の働きと切り離して考えることはできないのである。
[内田 謙]
道具器官としての手
動物や鳥類の作業器官は歯や嘴(くちばし)であり、そして前肢である。鳥類は嘴で物をとらえたり、ちぎったりし、その際、足は物を押さえる役割をしている。とくにオウムの足は、食物をつかみ、嘴のほうへもっていく捕捉(ほそく)器官としての役割を果たしている。また猛禽(もうきん)類の曲がった鋭い嘴は、手斧(ておの)の働きをもっており、ツルの嘴は、やっとこの原理をそのまま実現しているのである。
5本の指をもって、片手で物をつかむことができるのは霊長類だけである。霊長類の手は、それぞれの生活に適応して変化し、それに従って手の形態も機能も異なっている。たとえば、人間に近い形態と機能を備えているサルをみてもわかるように、もし人間の手と同じように「つかむ」機能をもっていたとしても、樹上生活をしている限り、その能力の大半は身体の支持と移動のために費やされ、本当に手が解放されたとはいいがたい。
手が道具としての最高の完全さを実現するためには、上肢が歩行器官としての役割から完全に解放されなければならない。直立二足歩行の適応が手を解放したのである。
人間の手は、道具(あるいは物)との結び付きのなかで、その働きがいっそう拡大されたのである。
手のなかに握られた道具、たとえば小刀や、茶の湯で用いられる茶筅(ちゃせん)などは、あたかも生来の器官であるかのように、手と一体となって作用している。ところが、手に握られている道具は、握られている間だけ、その目的のための作業を遂行しているが、いったん手から離れてしまうと、目的のための作用を果たせなくなってしまう。いいかえれば、手自身が道具器官として働いていると同時に、手に握られる道具を取り替えることによって物をつくる手、創造する手を実現しているのである。
動物や鳥類の嘴や前肢は、道具器官としての役割を果たしているが、人間の手のなかの道具のように取り替えの原理をもっていないために、その働きは限られてくる。人間の手と道具とが一体となって働く考えは、すでに先史時代の岩壁画に表されている。これは、神話的な世界の儀式的道具として解釈されているが、この岩壁画は、道具が人間のもっている個々の器官の働き(この絵では手の働き)を外化(がいか)したものであると解釈できる。
[内田 謙]
つかむ機能と技術
われわれは、人間としての活動に適した環境をつくりだすために、つまり第一の自然を征服するために、第二の自然である人体のさまざまの機能や構造を延長させて、それぞれの機能を模倣し、拡大させて、道具や機械などをつくってきた。技術哲学者エルンスト・カップErnst Kapp(1808―96)は、人間の発明したすべての手段、つまり道具や機械のうえに、人間の身体の内外のあらゆる機能の原型が示されているとして、「器官射影論」を組み立てている。
現在、工場のなかで稼動されているロボットの多くは、手の働き、とくに「つかむ」機能を外化したものである。つまり人間の手の「つかむ」機能を機械に置き換えようとする試みである。これには、原子炉で用いるマニピュレーター、自動車組立て作業における自動溶接機、塗装ロボット、あるいは本のページを1枚1枚めくるロボット、事故などで失った手を補うための義手などがある。「つかむ」機能を機械に置き換えるためには、多くの要因が複雑に絡み合ってくる。われわれはある物を握ろうとする場合、対象物の大きさ、形状、重さ、外力などを認識したあとに、自分の手および指の大きさ、握るための基本動作、指の形状、物を握るために必要な指の数、指の配置などを考え、対象物に適応した操作を行う。さらに、その物を移動させる場合には、移動中にその物を落とさないように注意して保持しているのである。
このように、「つかむ」手にはいろいろな要因が重なり合っているため、人間の手を完全にシミュレートして、機械の手を再現することは不可能であろうといわれているが、それらの要因を少しずつ組み立てて、ロボットはつくられているのである。
[内田 謙]