デジタル大辞泉 「制御装置」の意味・読み・例文・類語
Sponserd by ![]()
Sponserd by ![]()
出典 精選版 日本国語大辞典精選版 日本国語大辞典について 情報 | 凡例
Sponserd by ![]()
制御システムのなかで、制御システムの使命に基づいてあらかじめ設定された操作を制御対象に行う装置である。
[山﨑弘郎]
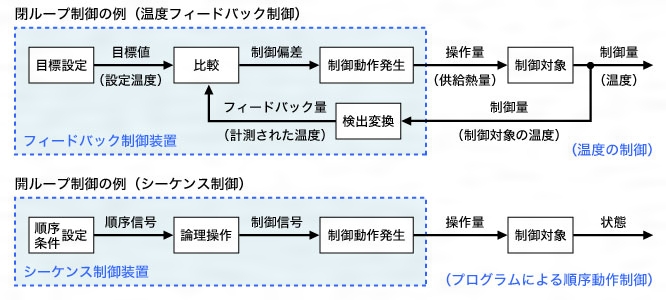
自動化システムについて制御信号の伝達経路に着目すると、開ループ制御と閉ループ制御とに大別される。後者は、制御の結果に関する情報が、制御信号を発信する部分に常時フィードバックされて、目標との偏差が0になるように操作される。目標と結果との因果関係が常時フィードバックにより密接であるので閉ループ系とよばれる。制御結果のフィードバックがない制御を開ループ制御システムという。シーケンス制御は開ループ制御の典型例であり、フィードバック制御は閉ループ制御の典型である。開ループ制御と閉ループ制御の制御装置の構成例をに示した。
[山﨑弘郎]
シーケンス制御を実行する装置はシーケンス制御装置(シーケンスコントローラー)である。シーケンス制御は一つの動作が終了すると、あらかじめ定められた条件や時間経過に従って次の動作が開始される順序制御である。自動販売機や電気洗濯機など、あらかじめ定められた順序に従い、複数の状態を実現する自動機械において、その前の動作の終了を確認してから次の状態に移行する。細かくいうと、前の動作の経過時間により終了と判定するものと、前の動作終了という条件の成立を確認してから次の動作に入るものとがある。いずれにせよ、このような順序制御により複数の動作を行う機械や複数の工程からなる生産設備において、動作を自動化するためにはシーケンス制御装置は必須(ひっす)である。シーケンス制御装置は、入力信号あるいは命令を情報処理機能により判断して対象に制御信号を発信する情報機械である。その基本的機能としては論理判断を実行する論理回路、度数を数える計数回路、経過時間を計るタイマー機能などから構成される。初期のシーケンス制御装置はリレーやタイマーなどを結線したものであったが、それでは機能やプログラムの変更が困難であるので、ピンボードによるプログラム方式となり、現在のデジタルコンピュータを中核とした装置に移行した。デジタルコンピュータ自体が、順序制御機械であるから、そのような移行は必然的である。しかし、実際に移行したのはマイクロプロセッサーが出現して信頼性やコストの問題が解決された1970年代後半であった。マイクロプロセッサーの導入により、プログラム変更や修正が容易になっただけでなく、機能が向上した。なお、プログラムが変更可能なシーケンス制御装置はプログラマブル・ロジック・コントローラー(略称PLC)とよばれている。
[山﨑弘郎]
閉ループ制御であるフィードバック制御を実行する装置である。典型例は温度や流量、圧力などの定値制御を行うプロセス調節計である。装置の基本的機能は目標となる値を設定する機能、現在の制御対象の値を計測して目標値と比較して制御偏差を求める機能、制御偏差を減少するように対象を操作する操作信号を発信する機能などからなる。ここで、目標値は一定ではなく、時間とともに変化する場合が多い。フィードバック制御装置の特性を支配する情報処理機能は制御偏差を演算して適切な操作信号をつくりだす演算機能である。いま対象の調節動作を行うのがヒーターとか調節弁であるとする。計測した温度が目標温度より低ければヒーターをオン、弁を全開とし、逆に目標値より高ければ、ヒーターをオフ、弁を閉じる。このような動作がフィードバック制御のもっとも簡単な場合でオンオフ制御という。われわれの身の回りにも温度のオンオフ制御を行う機器が多い。しかし、オンオフ制御では制御される温度が目標値付近で周期的に振動し、けっして一定値にはならない。一定値に制御するためには偏差の大きさに対応して操作信号も連続的に変化させねばならない。これを連続制御動作というが、その制御動作に3種類ある。操作量の変化幅を偏差に比例させる動作を比例動作(P動作)という。操作量の変化幅を偏差の時間積分に比例させる動作を積分動作(I動作)という。また、操作量の変化幅を偏差の時間微分に比例させる操作を微分動作(D動作)という。
比例動作では、制御対象の負荷や目標値が変化したときに目標値に到達できず、オフセットとよばれる偏差が残る。積分動作では操作量の変化速度(時間微分)が偏差に比例するので、偏差が0になるまで操作量が変化して、目標値に到達できる。微分動作は単独で制御はできないが、偏差の変化速度を利用して制御量の行きすぎを抑えて制御結果を安定させる。このような性格の異なる3動作が、制御対象のもつ熱容量や慣性による応答遅れを考慮して組み合わされる。比例+積分動作を「PI動作」とよび、負荷の変動に強い制御を実現する。比例+積分+微分動作を「PID動作」とよび、大きな応答遅れをもつ対象を、負荷変動や外乱に対して目標値に保持する制御に使われる。
これらの制御動作は、かつては空気圧を利用した演算器やアナログ電子回路などにより生成されたが、現在ではマイクロプロセッサーを利用したデジタル演算により生成される。多数のプロセス変量とその目標値に対して、操作量をデジタルで演算して出力する時分割制御装置が現在のプロセス制御の中核であり、DCS(digital control system)とよぶ。また、DCSは分散型制御システム(distributed control system)の略として使う場合もある。これは、プロセスのすべての制御システムの演算を1個のプロセッサーで時分割演算をするかわりに複数のマイクロプロセッサーに分散処理させることによりプロセッサーの故障のリスクを分散するシステムである。
制御動作の説明では目標値と計測値がそれぞれ1個の場合について説明したが、目標値が別の制御装置の操作量出力である場合がある。この場合、制御システムは二重のフィードバック・ループをもち、カスケード制御という。DCSが発展した結果、制御動作が、前記のPID動作などに限定されず複雑で自由な演算も可能になった。新しい制御理論に基づく最適化制御や多入力多出力などの制御システムが可能になった。そのなかには、すべてが閉ループではなく、外乱と対象の特性にあわせて開ループで制御するフィードフォワード制御も含まれる。
[山﨑弘郎]
フィードバック制御装置のなかで、時間とともに変化する目標値を正確かつ速やかに追従する装置をとくにサーボ制御装置という。プロセスの定値制御を中心に発達した調節計と異なり、重量のある銃や砲を航空機のように移動する目標にねらいをつけて動かす必要から開発された。目標の方位と現在の銃砲の方位との差を0にするように、偏差を増幅して銃砲をモーターで駆動する。このようなモーターはサーボ制御装置の一部を構成しているのでサーボモーターとよばれ、制御装置全体をサーボ制御システム、動作機構をサーボメカニズムという。サーボメカニズムは大きな質量や慣性をもつ物体を、手で軽く自在に動かすことができるので、自動車のパワーステアリングやロボットの手足の制御などに広く使われている。サーボ制御においても、追従を正確にするためや応答速度を高めるために積分動作や微分動作などが補償動作として利用される。積分動作は位置精度を高めるために制御信号の位相を遅らせるので位相遅れ補償とよばれ、微分動作は制御対象やサーボモーターの慣性による遅れを除いて応答速度を高めるのに使用され、位相進み補償とよばれる。ただ、サーボモーターの回転角は入力の時間積分に比例するのでプロセス制御とは若干異なる。
サーボ制御では制御結果がフィードバックされるものの、制御対象のトルクや反動などが目標値設定側には伝わらず情報の流れが一方向である。それに対して制御対象からの情報が目標値設定側に伝達され情報の流れが双方向であるシステムをバイラテラルサーボとよび、一方向であるユニラテラルサーボと区別する。通常はサーボモーターのトルクの一部が目標値を動かすトルクに伝達され、目標値を動かす操作者は対象を動かす手ごたえを感じることができる。自動車のパワーステアリングやロボットのなかにはバイラテラルサーボがかなり使われており、やわらかい物あるいは壊れやすい対象を扱うことが可能になる。
[山﨑弘郎]
記憶装置に入っている機械語のプログラムから命令を取り出し、解読し、その結果に従ってコンピュータの各部分に信号を送って演算装置や入出力装置などを制御し、命令を実行させ、実行が終わると次の命令を取り出す。このようなコンピュータの動作を統轄するのが制御装置である。制御装置と演算装置をあわせてCPU(中央処理装置central processing unit)とよぶこともある。
また、入出力装置などの細かな動作まですべてをCPUが制御していては、CPUの負担が大きくなりすぎる。このため、簡単な指示で複雑な機能を遂行できるように、入出力装置などの側にも専用の制御装置をつけることが多い。これらの制御装置はCPUからの指示に従い、内蔵されているプログラムに従って機器の制御を行う。代表的なものにディスク制御装置、回線制御装置などがある。
[大野義夫]
『計測自動制御学会編『自動制御ハンドブック 機器・応用編』(1983・オーム社)』▽『多田隈進・大前力著『制御エレクトロニクス』(2000・丸善)』▽『平野武著『制御装置の基礎』3訂版(2004・成山堂書店)』
出典 小学館 日本大百科全書(ニッポニカ)日本大百科全書(ニッポニカ)について 情報 | 凡例
Sponserd by ![]()
出典 ブリタニカ国際大百科事典 小項目事典ブリタニカ国際大百科事典 小項目事典について 情報
Sponserd by ![]()
…こういった算術演算の回路のほかに,論理演算回路,たとえばビットの0,1の反転,二つの二進数のビットごとのANDやORなどの演算回路,二進数を右左にずらすシフト演算回路などがALUの主な要素である。 CPUのうち,(逐次)実行制御を行う回路をシーケンサーまたは制御装置と呼ぶ。一つの命令の実行が終わったあと,次に実行すべき命令をメモリーから読み出し,それを解読(デコード)し,ALUやメモリーの適切な部分が作動するように電子的な指令を出す(実際には先行的な制御を行う)。…
※「制御装置」について言及している用語解説の一部を掲載しています。
出典|株式会社平凡社「世界大百科事典(旧版)」
Sponserd by ![]()
ローマ法王ともいう。ラテン語 Papaの称号はカトリック教会首長としてのローマ司教 (教皇) 以外の司教らにも適用されていたが,1073年以後教皇専用となった。使徒ペテロの後継者としてキリスト自身の定...