日本大百科全書(ニッポニカ) 「磁気浮上式鉄道」の意味・わかりやすい解説
磁気浮上式鉄道
じきふじょうしきてつどう
磁力で支持・案内されて、定められた走行路を接触することなく走行する乗り物。非接触のため騒音・振動の軽減が期待でき、また車輪走行では達せられない高速走行が可能になる。
[佐々木拓二]
磁気浮上の原理
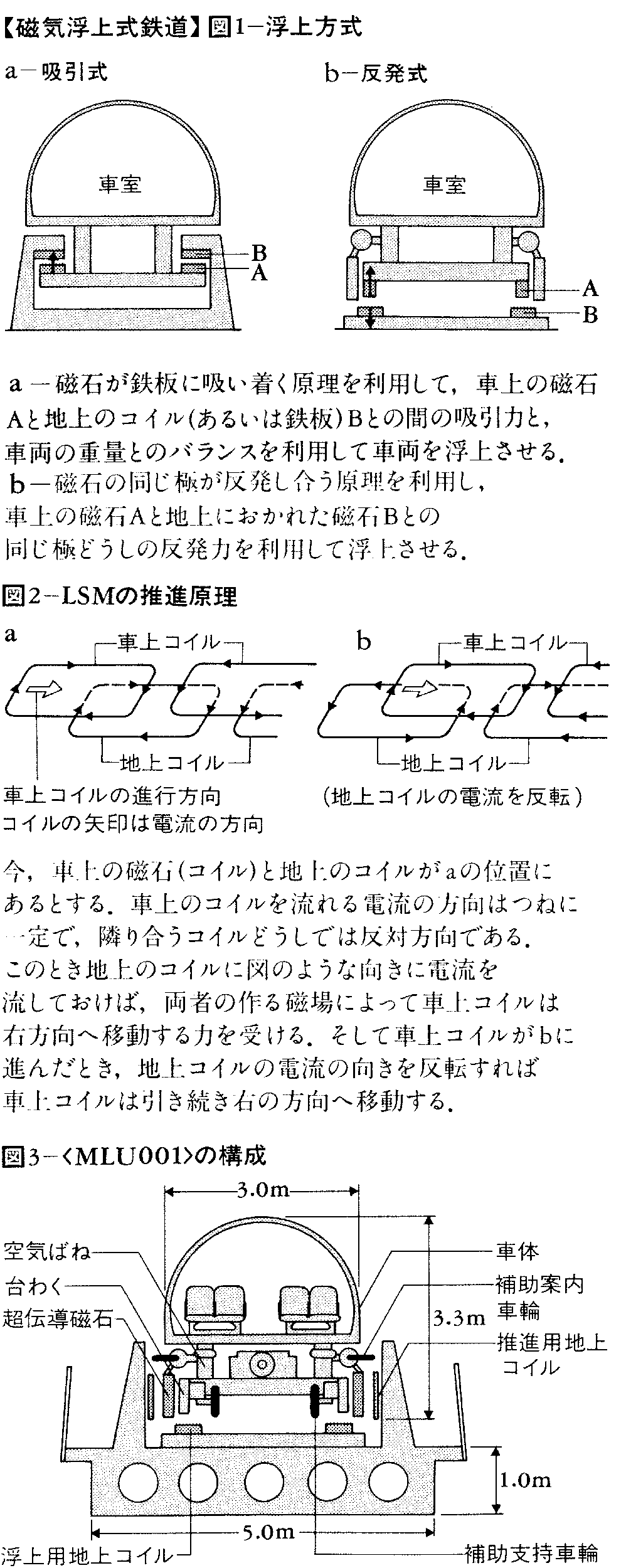
鉄などの磁性体と磁石の間や、磁石の正極(N極)と負極(S極)の間には吸引力が働き、同じ極の間では反発力が作用する。磁気浮上(Magnetic Levitation。マグレブMaglevと略す)の原理は、この磁石の性質を利用して車両を浮上させ、リニアモーター等の推進力で車両を走行させる。
浮上力の発生メカニズムによって原理的にEMS(Electro Magnetic Suspension)方式とEDS(Electro Dynamic Suspension)方式とに区分される。また構成する磁石によって前者は常電導磁気浮上と、後者は超電導磁気浮上とよばれる。
常電導磁気浮上(EMS)方式は、鉄などの磁性体の軌道と、車両側の磁力の強さを制御できる電磁石とで構成される。電磁石と鉄軌道のすきまを検知して、すきまが少なくなると磁力を弱めて吸引力を小さくし、大きくなると磁力を強くして吸引力を増すことによって浮上高さを一定に保つ。
超電導磁気浮上(EDS)方式は、車両に組み込まれた強力な超電導磁石と、軌道の側壁に連続的に配置した8の字構成の浮上コイルとで構成される。浮上コイルの近傍を強力な磁石が移動すると、その磁石の上下の位置に応じて上部コイルと下部コイルに誘起する電圧差により電磁誘導の原理によってコイルに電流がおこる。このコイルに流れる電流と超電導磁石との反発力と吸引力とで磁石を左右から引き上げることにより浮上するのが側壁浮上方式である。原理的にはヌル・フラックス浮上方式が本来の名称である。宮崎実験線では建設当初は超電導磁気浮上を反発式磁気浮上と表現し、常電導磁気浮上の吸引式磁気浮上と対比させていたが、山梨実験線で側壁浮上方式が採用されることになり、この場合は反発力だけでなく吸引力も併せて浮上に寄与することになるため、反発式の用語は適さなくなった。このため宮崎実験線での磁気浮上方式の名称は、浮上コイルの位置(側壁ではなく軌道下面)に対応して、対向浮上方式とよばれるようになり、新たな側壁浮上方式と区別されることになった。
常電導磁気浮上(EMS)方式は、すきま(浮上高さ)が1センチメートル以下と小さく、精度の高いすきま検知と瞬時に反応する制御システムがなければ浮上高さを一定に保つことができない。しかし速度にかかわらず浮上できる長所があり、停止状態でも浮上できる。
超電導磁気浮上(EDS)方式は、磁石の位置が下がれば自動的に浮上力が増すため本質安定系で、磁力の制御は不要である。浮上高さ(実空隙)も10センチメートル程度確保できる。しかし強力な磁石が必要なため、超電導の原理による超電導磁石を使用することとなる。この方式は停止中および低速での走行中は浮上できないため、補助的な支持・案内装置を必要とする。
[佐々木拓二]
研究と実用化
磁気浮上式鉄道は、各国で研究・開発が行われてきた。
(1)常電導磁気浮上式鉄道 旧西ドイツは、1969年に試験車両TR01を製作して実験を開始し、1979年ハンブルクの国際交通博覧会にTR05を出展、デモンストレーション走行を行った。TR05は2両編成で長さ26メートル、自重30トン、最高時速75キロメートルで、68人乗り、推進は地上1次(地上の軌道に電力を供給して制御)リニアシンクロナスモーター(リニア同期モーター)方式による。博覧会に先立つ1978年には、高速での実用化を目ざして実験線をエムスランド地方のラーテンに建設することを決定しており、1983年から実験車TR06を使っての走行実験が開始され、1988年には時速412.6キロメートルの有人世界記録を達成した。さらに、1989年12月には実験車TR07で時速436キロメートルの速度記録を更新した。1990年のドイツ統一後も開発は続けられ、ドイツの常電導磁気浮上式超高速鉄道トランスラピッドTransrapidは、2005年開業の予定で、営業速度450~500キロメートルでハンブルク―ベルリン間を結ぶ実用線を目ざしたが、コストの面で折り合わず2000年2月にこの計画は中止された。しかし、2001年1月上海(シャンハイ)市内―浦東(プートン)国際空港間約30キロメートルを最高時速430キロメートルで結ぶトランスラピッド実用線の建設を中国との間で調印、同年3月起工された。同線は2002年12月に試運転を開始、2004年から営業運転を行っている。一方ドイツ国内においては、ミュンヘン空港へのアクセスとして採用が検討されたものの、最終的には建設費が高いことから採用は見送られた。その後、2006年9月にエムスランド実験線で大きな事故を起こし、ドイツ国内での実用化は断念せざるをえない状況になった。
イギリスでは、バーミンガム空港で、軌道長600メートルの常電導磁気浮上方式の輸送システムが1984年から実運用に入り、小規模・低速ながら世界初の磁気浮上の実用化システムとなった。しかし、1995年の設備更新の際に、この磁気浮上方式は廃止された。
日本では日本航空が中心となって、常電導磁気浮上方式の開発を進めてきた。実験車はHSST(High Speed Surface Transport)とよばれ、1985年(昭和60)筑波研究学園都市(つくばけんきゅうがくえんとし)で開催された国際科学技術博覧会では、HSST-03が走行した。長さ13.8メートル、高さ3.0メートル、自重約12トンで、推進は車上1次(車両に電力を供給して制御)リニアインダクションモーター(リニア誘導モーター)であった。しかし、採算性などから実用化は進まず、日本航空はHSST事業から撤退した。その後、中部エイチ・エス・エス・ティ開発(名古屋鉄道、愛知県などが出資、1989年設立)が中速の中規模輸送機関としてHSSTの開発を進め、1991年(平成3)より名古屋の大江実験線で走行実験を開始した。実験に使われた車両はHSST-100SとHSST-100Lである。そして2005年(平成17)3月、HSST-100Lを基本とした車両により、愛知高速交通の東部丘陵線(名古屋市名東区藤が丘―豊田市八草町間8.9キロメートル)で、常電導磁気浮上方式での営業運転が開始された(愛称「リニモLinimo」)。8ミリメートル浮上し、最高時速100キロメートルで走行する。なお、この東部丘陵線は、2005年日本国際博覧会(愛知万博)においても、会場までの輸送機関として活躍した。
(2)超電導磁気浮上式鉄道 超電導マグレブMAGLEV(Superconducting Magnetically Levitated Vehicle)ともいう。日本で一般にリニアモーターカーというと、この方式をさすことが多い。各国で研究されたが、実規模の設備で実験を行ったのは日本と西ドイツだけである。西ドイツでは、1970年代にエルランゲンに建設された円形実験線で実験が行われたが、1979年に打ち切られ、その後の開発は常電導磁気浮上式に絞られた。
日本では、日本国有鉄道を中心として開発が進められてきた。1972年日本の鉄道開業100年記念の一環として製作されたML100は、超電導磁気浮上とリニアインダクションモーター推進により、東京・国分寺市の鉄道技術研究所内の長さ480メートルの実験線で浮上走行に成功した。その後、1974年に全長7キロメートルの浮上式鉄道宮崎実験線が着工、1977年7月に1.3キロメートルの区間が完成し、ML-500の走行実験が開始された。高速走行実験は、全線7キロメートルが完成した1979年から行われ、12月には無人走行で最高時速517キロメートルを記録した。ついで、より実用に近い軌道構造への改造が行われ、1980年新しい実験車MLU001での実験に入った。3両編成、全長約29メートル、重量約30トン、客席32のMLU001は1982年から有人走行実験を行い、1987年には有人走行で時速400.8キロメートルを達成した。
1987年4月の国鉄の分割・民営化に伴い、開発は前年に発足した財団法人鉄道総合技術研究所に引き継がれ、以降、JR東海と鉄道総合技術研究所が中心となって開発が進められた。1990年からは、運輸大臣(現、国土交通大臣)の承認を得た国家プロジェクトとして推進され、同年山梨実験線が着工された。1997年に先行区間18.4キロメートルが完成して実験走行が開始され、12月にMLX01による無人走行で時速550キロメートルを記録し、1999年には有人走行による世界最高記録、時速552キロメートルを達成した。また、2003年12月には有人走行で時速581キロメートルと、世界最高記録を更新した。これら基本走行実験のほかに、総合機能確認試験、信頼性・長期耐久性確認試験などを進めるなかで、コスト低減や車両の空力特性の改善などの技術開発を進め、2005年3月には国土交通省の超電導磁気浮上式鉄道実用技術評価委員会から「超電導磁気浮上式鉄道について実用化の基礎技術が確立した」との評価を受けるに至った。
2011年9月で山梨実験線での実験は中断し、先行区間の設備を実用化仕様に更新するとともに山梨実験線を当初計画の42.8キロメートルに延伸する工事が行われた。2013年8月からは、営業線仕様の新型車両L0(エルゼロ)系での走行試験が再開された。JR東海としては、東海道新幹線のバイパス路線としての中央新幹線を磁気浮上方式で建設することで、必要な手続きを進めており、山梨実験線もその路線の一部として計画されている。
[佐々木拓二]
『ラルフ・R・ロスバーグ著、須田忠治訳『磁気浮上式鉄道の時代が来る?』(1990・電気車研究会)』▽『澤田一夫・三好清明著『翔べ!リニアモーターカー』(1991・読売新聞社)』▽『正田英介他編『磁気浮上式鉄道の技術』(1992・オーム社)』▽『電気学会磁気浮上応用技術調査専門委員会編『磁気浮上と磁気軸受』(1993・コロナ社)』▽『鉄道総合技術研究所編『ここまで来た!超電導リニアモーターカー』(2006・交通新聞社)』▽『鉄道の百科事典編集委員会編『鉄道の百科事典』(2012・丸善)』▽『佐々木拓二著「実験車両時代の思い出」(『鉄道車両と技術』通巻第189号~190号所収・2012・レールアンドテック出版)』▽『佐々木拓二著「磁気抗力と極ピッチ」(『鉄道車両と技術』通巻第191号~192号所収・2012・レールアンドテック出版)』
出典 小学館 日本大百科全書(ニッポニカ)日本大百科全書(ニッポニカ)について 情報 | 凡例
Sponserd by ![]()