
改訂新版 世界大百科事典 「骨組構造」の意味・わかりやすい解説
骨組構造 (ほねぐみこうぞう)
framed structure
細長い棒状の部材を組み立てて作られた構造物。部材としてはふつう直線状の部材を用いる。部材と部材の接合点を節点という。現実の構造物では,部材と節点とは必ずしも明りょうには区別できないが,その場合にも,部材は太さのない直線に理想化し,その交点である節点は大きさのない点として認識する。
三角形に組んだ部材を基本単位として作られる骨組構造を一般にトラスtrussという。三角形はその各辺が長さを変えない限り形が変わらないので,節点で部材が互いに回転できるようにしてもよい(このような節点をピン節点という)。これに対し四角形やそれ以上の多角形をピン節点で接合した部材で作ると,容易に形が変わってしまって骨組みとして役に立たない。しかし四角形であっても,節点を互いの部材が自由には回転できないようにしてしまうと(このような節点を剛節点という),部材が曲がって抵抗するようになる。このような骨組構造を一般にフレームframeまたはラーメンRahmen(フレームを意味するドイツ語)と呼ぶ。
骨組構造は現実にはすべて立体構造である。立体には,平面を組み合わせて作ったもので力学的には平面に分解できるものと,どのような平面にも分解不可能なものとがある。前者を構成する各平面を平面骨組構造,後者を立体骨組構造という。
骨組構造の種類
建造物に用いられる骨組構造にはトラス,ラーメン,平面,立体を組み合わせた次のものがある。
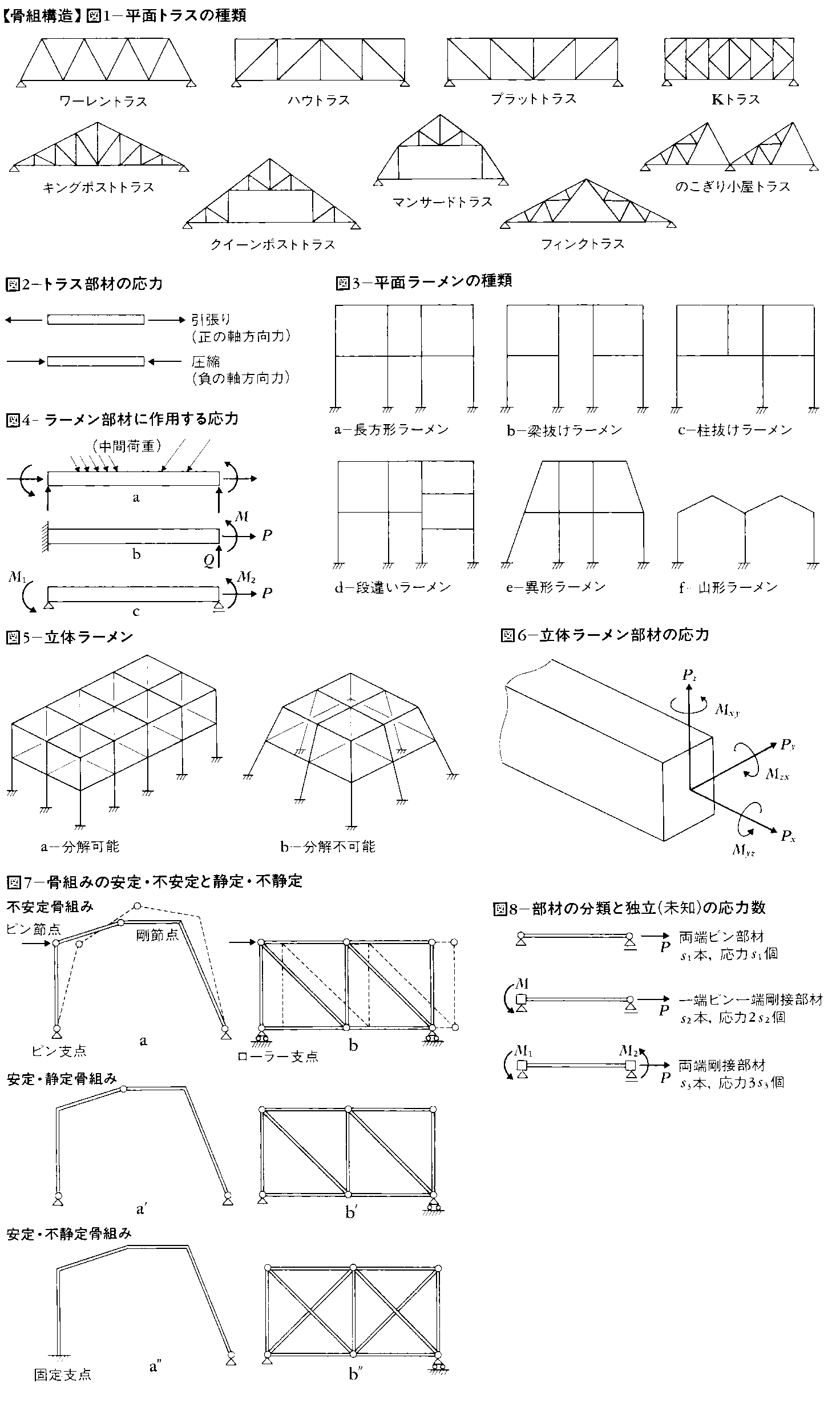
(1)平面トラス 形状には図1に示したようなものがあり,伝統的に名称のついているものも多い。主として橋に用いられるものと,主として屋根に用いられるものがあることは,形状から明らかであろう。これらの平面トラスでは,各部材は図2に示すような軸方向力を受けると考える。軸方向力は部材の内部に働く力(応力)の一種であって,引張り力と圧縮力の区別があるが,これは力学的には同じ応力の正負の区別にすぎない。現実のトラスの節点は完全なピンではないので,部材には軸方向力のほかに曲げモーメントやせん断力が作用するが,これらの応力は設計上は二次応力と呼ばれて,その影響がとくに大きい場合以外は無視される。構造設計をする立場では,構造物がある外力(荷重ともいう)を受けたとき,1本1本の部材の中の応力を知ることが必要である。平面トラスで一次応力だけを対象とするときは,一部材につき1個の軸方向力を求めればよい。かりに100本の部材からなるトラスがあれば,100個の未知数をもつシステムとみることもできる。
(2)立体トラス 部材を立体的に組み合わせて骨組みを構成するもので,その形状には無限の変化が可能であるが,実際には施工のしやすさなどを考慮して,平面トラスを立体的に組み合わせた形のものが多い。力学的にも,平面トラスと同様に節点はピンであると仮定するので,一部材につき1個の軸方向力が求めるべき応力になる。
(3)平面ラーメン 図3-aのように四角形を基本とするが,b~fのように変化はいくらでも考えられる。建築物に限らず,あらゆる種類の構造物に利用することができる。これらの平面ラーメンを構成する部材には,図4-aのように一般には中間荷重が作用し,両端には三つずつの応力(反力)が作用している。両端に作用する合計六つの応力のうち,三つは部材全体の力のつりあいを考えて決めることができるので,部材1本につき三つの独立の(未知の)応力が存在することになる。それらは図4-bまたはcのように表される。
(4)立体ラーメン 図5-aのように平面ラーメンが互いに直交するときには,それらを独立の平面ラーメンに分解することができるが,図5-bのようなラーメンは交差するラーメンが互いに力を及ぼし合うので,平面に分解することができず,立体ラーメンとして解析しなければならない。立体ラーメンの部材に作用する独立の応力は,図6のように六つである。
(5)合成骨組み トラスのようなピン節点と,ラーメンのような剛節点とを両方もっている骨組みを合成骨組みといい,トラスとラーメンの中間的な性格のもの。
安定と不安定,静定と不静定
図7-aのように力を加えると直ちに変形してしまうものを不安定骨組みまたは不安定機構という。図7-bのように変形はしないが移動してしまうものも不安定骨組みである。不安定骨組みはそのままでは構造物に利用することはできないが,構造物の性質を調べるときの力学的手段として重要なものである。骨組みが安定であるかどうかを判別するのは,単純なものなら図を眺めただけでわかるが,複雑なものになると後述の数式によらなければならない。図7-a′,b′は骨組みの形も支持方法もともに安定である(安定骨組み)。これらの骨組みからどれか1本でも部材を取り除いたり,剛節点をピン節点におきかえたり,ピン支点をローラー支点に変えたりすると不安定骨組みになってしまう。これらは,安定骨組みとしての最小限の条件を満たした骨組みであり,力学的には,反力と部材応力のすべてを,静力学のつりあい条件だけで定めることができる。その意味で,このような骨組みを静定であるという。図7-a″,b″の骨組みは,a′,b′と比較すれば明らかなように,何本かの部材を取り除いても(b″),あるいは剛節点をピン節点に変えても(a″),依然として安定骨組みである。すなわち,安定骨組みであるために必要な部材数および反力数以上の部材または反力をもっている。力学的には,静力学のつりあい条件だけで定められる数以上の部材応力と反力があるので(つまり方程式の数より未知数の数が多いので),静力学だけでは解くことができない。そこでこのような骨組みを不静定であるという。これを解くには,部材の応力と変形との関係を考慮しなければならない。
骨組みが安定か不安定か,安定であるときさらに静定か不静定かを判別するための公式として,次のものがある。ただし,これは平面骨組みに関するものである。いま,支点も含めて節点の数をk,支点反力の数(固定支点では3,ピン支点では2,ローラー支点では1と数える)をn,部材の数をs,剛節接合材数(節点において,一つの部材に剛に接合されている部材端の総数)をrとするとき,(1)2k>n+s+rのときは不安定,(2)2k=n+s+rのときは安定かつ静定,(3)2k<n+s+rのときは安定かつ不静定(このときn+s+r-2kを不静定次数という)である。ただし(1)のときには必ず不安定となる(十分条件)が,(2),(3)は必要条件であって,上式を満足しても不安定の骨組みは存在しうる。
この判別式でもっともわかりにくいのは剛節接合材数rである。いま,合計s本の部材のうち図8に示すように両端ピンの部材がs1本,一端ピン一端剛節接合の部材がs2本,両端とも剛節接合の部材がs3本あるとすると(s=s1+s2+s3),骨組み全体での未知の部材応力の数はs1+2s2+3s3である。このほかに反力がn個あるので,未知数の数は合計n+s1+2s2+3s3となる。一方,全部でk個ある節点のうちで完全ピン節点(どの2部材も剛接合でない)がk1個,剛節点(少なくとも2部材が剛接合である)がk2個あるとすると(k=k1+k2),前者ではx方向とy方向のつりあい式が,後者ではそのほかにモーメントのつりあい式が成立する。すなわちつりあい式の数は合計2k1+3k2である。安定・不安定,静定・不静定の判別は,未知数と条件式の数の大小関係,
2k1+3k2 n+s1+2s2+3s3
n+s1+2s2+3s3
で行えばよい。これを変形して,
2(k1+k2)n+(s1+s2+s3)+(s2+2s3 -k2)
すなわち,
2kn+s+r
としたのが先の判別式で,結局,
r=s2+2s3-k2
が剛節接合材数の定義である。図8を参照すれば,s2+2s3は節点に剛に接合される部材端の総数になる。
骨組構造の解法
骨組構造の設計に際しては,構成部材の各部分に作用する応力がすべてわからなければならない。しかし,図8に独立な応力と記したものが求まれば,あとは簡単な力のつりあい条件だけで任意断面の応力を求めることができる。そこで,骨組みを解くということは,n個の反力と(s1+2s2+3s3)個の部材応力を求めることを意味し,さらに,反力は部材応力さえ求まればこれを用いて簡単に表すことができるので,結局,m=s1+2s2+3s3個の部材応力を求めることが必要である。
そのための条件式は節点におけるつりあい式で,全部で(2k1+3k2)個あるが,反力を求めるためにそのうちn個の式を使うので,残りのl=2k1+3k2-n個の式が,部材応力決定のために利用できる。
mとlの大小関係は,先に述べた判別式と同じであって,l>mであれば不安定であり,l≦mが安定であるための必要条件となる。節点外力ベクトル(要素数はl)をp,部材応力ベクトル(要素数はm)をpmと書くと,pとpmの関係を表すつりあい方程式が,
p=Cpm ……(1)
という形に書ける。Cはl行m列の行列である。静定骨組みのときにはl=mであり,Cが正方形の非特異行列となるので逆行列が存在し,pm=C⁻1pとして,与えられた節点外力ベクトルpから部材応力ベクトル pmが求まる。
不静定構造ではl<mなのでCの逆行列は存在しない。この場合の解法には,大別して変位法と応力法と呼ばれる2種類があるが,以下には変位法の概略を説明する。部材の応力と変形の関係式を構成方程式と呼び,部材の長さと断面形と弾性定数がわかっていれば,
pm=Kmdm ……(2)
という形に書ける。dmは要素数mの部材変形ベクトルで,Kmはm×mの正方行列である。部材変形ベクトルdmと,要素数lの節点変位ベクトルdとの間には,仮想仕事の原理を用いると,
dm=Ctd ……(3)
という関係が成り立つことを証明できる。ここにCtはCの転置行列である。(2),(3)式を(1)式に代入するとp=(CKmCt)dとなり,(CKmCt)はl×lの正方行列になる。骨組みが不安定でない限りこれは非特異で逆行列が存在し,
d=(CKmCt)⁻1p ……(4)
と表せる。そこで,与えられた節点外力ベクトルpに対する節点変位ベクトルdを(4)式から求め,これを(3)式,(2)式に順次代入すると,部材応力pmが求まる。これが変位法による解法の原理である。
執筆者:青山 博之
出典 株式会社平凡社「改訂新版 世界大百科事典」改訂新版 世界大百科事典について 情報
Sponsored by ![]()