デジタル大辞泉 「サーボ機構」の意味・読み・例文・類語
Sponsored by ![]()
Sponsored by ![]()
出典 精選版 日本国語大辞典精選版 日本国語大辞典について 情報 | 凡例
Sponsored by ![]()
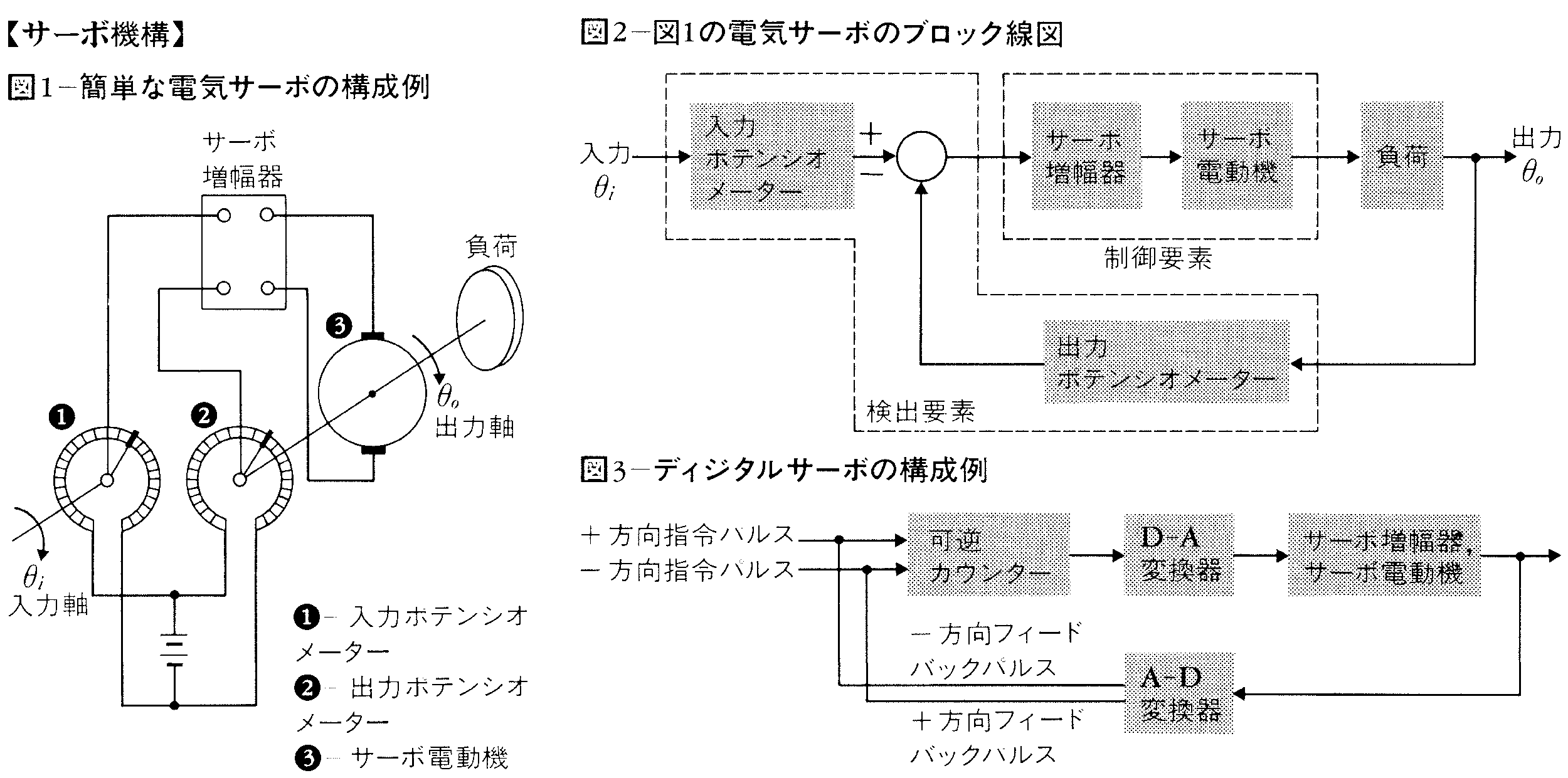
制御量が位置,姿勢,速度などの運動の制御系,すなわち位置制御(位置サーボ)または速度制御(速度サーボ)の系をいう。サーボの語源はラテン語のservus(奴隷slaveに相当)といわれている。奴隷の機能が主人の命令に忠実に従い力仕事をすることにあったように,サーボ機構の機能は目標値の変化に追従し,力やパワーを増幅することにある。サーボ機構は閉ループサーボと開ループサーボに大別される。前者の構成を簡単な電気サーボを例として図1に示す。目標値である入力軸角変位と制御量である出力軸角変位とをそれぞれポテンシオメーターで電圧に変換し,両電圧信号の偏差をサーボ増幅器で増幅してサーボ電動機に加え,偏差を打ち消す向きにサーボ電動機を回転する。この構成をブロック線図で示すと図2のようになる。これより閉じたループが形成されていることがわかる。このループの中を正弦状信号が絶えず循環してハンティングを生ずる可能性があるので,安定度を確保することが必要である。サーボは目標値に追従することを使命としているから,応答の速さも重要な特性である。これらの動特性のほかに,目標値が一定速度入力すなわちランプ入力の場合の定常偏差(速度偏差と呼ぶ)も重要な特性である。サーボ系の増幅器ゲイン(利得)を増すと速応性と定常偏差は改善されるが,安定性は阻害されるので,両者を妥協させる適当な値に調整する必要がある。サーボ系の設計,調整においては,位相余裕45度程度,ゲイン余裕10~20dBの経験則が用いられている。サーボ系の特性改善には,サーボ増幅器に補償回路を挿入する直列補償とタコメーター発電機によって出力軸角速度に比例する電圧をサーボ増幅器に加えるフィードバック補償とが一般的に用いられている。開ループサーボはステップモーターを用いた位置の制御系である。ステップモーターは電気的パルスの到来ごとに一定角度ずつ回転するモーターであるから,これに位置指令に応じて発生した指令パルスを入力することにより位置の制御が行われる。開ループサーボでは閉ループと異なり,不安定現象を生ずる恐れはない。ただ,パワーのある電気ステップモーターの実現は困難である。サーボ機構は系内の主要信号の種類によりアナログサーボとディジタルサーボとに分類される。前者は連続的信号,後者はパルスなどの離散的信号を用いている。図3はディジタルサーボの構成例を示す。出力軸にエンコーダーなどのA-D変換器を取り付け,単位回転角ごとにパルスを発生する。このフィードバックパルスと指令パルスとを可逆カウンターに入力して,逆向きにカウントする。カウンターの内容は入・出力間のディジタル偏差であるから,これをD-A変換してアナログ電圧とし,増幅後,サーボ電動機を駆動する。サーボ機構はエネルギー源により,電気,油圧,空気圧各サーボに分類される。電気サーボは動力源,使用上の便宜さの点で優れている。油圧サーボはコンパクトな構造で大出力が出せるので,すぐれた応答を実現する。重量を重視する航空機の制御に最適である。空気圧サーボは応答は劣るが,低コストが特徴である。サーボ機構は航空機や船舶の自動操縦,ロケットや人工衛星の誘導,NC工作機やロボット,レコーダーやプロッター,磁気ディスクのヘッドアクセス,半導体製造に必要なマスク合せ装置や自動ボンダーなどに応用される。
執筆者:大島 康次郎
出典 株式会社平凡社「改訂新版 世界大百科事典」改訂新版 世界大百科事典について 情報
Sponsored by ![]()
出典 株式会社平凡社百科事典マイペディアについて 情報
Sponsored by ![]()
出典 ブリタニカ国際大百科事典 小項目事典ブリタニカ国際大百科事典 小項目事典について 情報
Sponsored by ![]()
出典 小学館 日本大百科全書(ニッポニカ)日本大百科全書(ニッポニカ)について 情報 | 凡例
Sponsored by ![]()
… 狭義の自動制御は,制御しようとしている状態の種類によって二つに大別される。工業プロセスの状態――たとえば温度,流量,圧力,液位,組成,濃度,混合比率など――の制御をプロセス制御といい,物体の幾何学的状態――たとえば位置,角度,方位,姿勢など――の制御をサーボ機構という。冷蔵庫の温度制御はプロセス制御の例である。…
※「サーボ機構」について言及している用語解説の一部を掲載しています。
出典|株式会社平凡社「世界大百科事典(旧版)」
Sponsored by ![]()
夏の暑さに体が慣れること。数日から数十日間で起こる短期暑熱順化と、数年または数世代にかけて起こる長期暑熱順化とがある。→寒冷順化[補説]近年では、冷房設備の普及にともない短期暑熱順化が起こりにくくなっ...