デジタル大辞泉 「動的計画法」の意味・読み・例文・類語
どうてき‐けいかくほう〔‐ケイクワクハフ〕【動的計画法】
Sponserd by ![]()
Sponserd by ![]()
出典 精選版 日本国語大辞典精選版 日本国語大辞典について 情報 | 凡例
Sponserd by ![]()
略称DP。ダイナミックプログラミングともいう。利得の最大や経費の最小のための条件を求める数理計画の方法は,問題の型によってさまざまであるが,動的計画法もその一つで,アメリカのベルマンRichard Bellmanが1950年ころから提唱し始めたものである。
われわれの決定には1回だけで独立しているもののほかに,多段階的なものが多い。今期の決定が,次期における状況,可能な決定の範囲や効果等に影響を与えるというタイプのものである。今期の利得が大きくても,それが次期以降の利得を小さくする決定は必ずしも得策ではない。今期の決定は,次期以降の利得も計算に入れてはじめて最適なものになりうる。動的計画法は,このような多段決定過程の効果を数式によってモデル化し,その最適条件を求める方法を展開するものである。コンピューターによって数値解を直接求めるのに特に適しているので,オペレーションズリサーチ,自動制御,最適設計など多くの分野で活用されている。
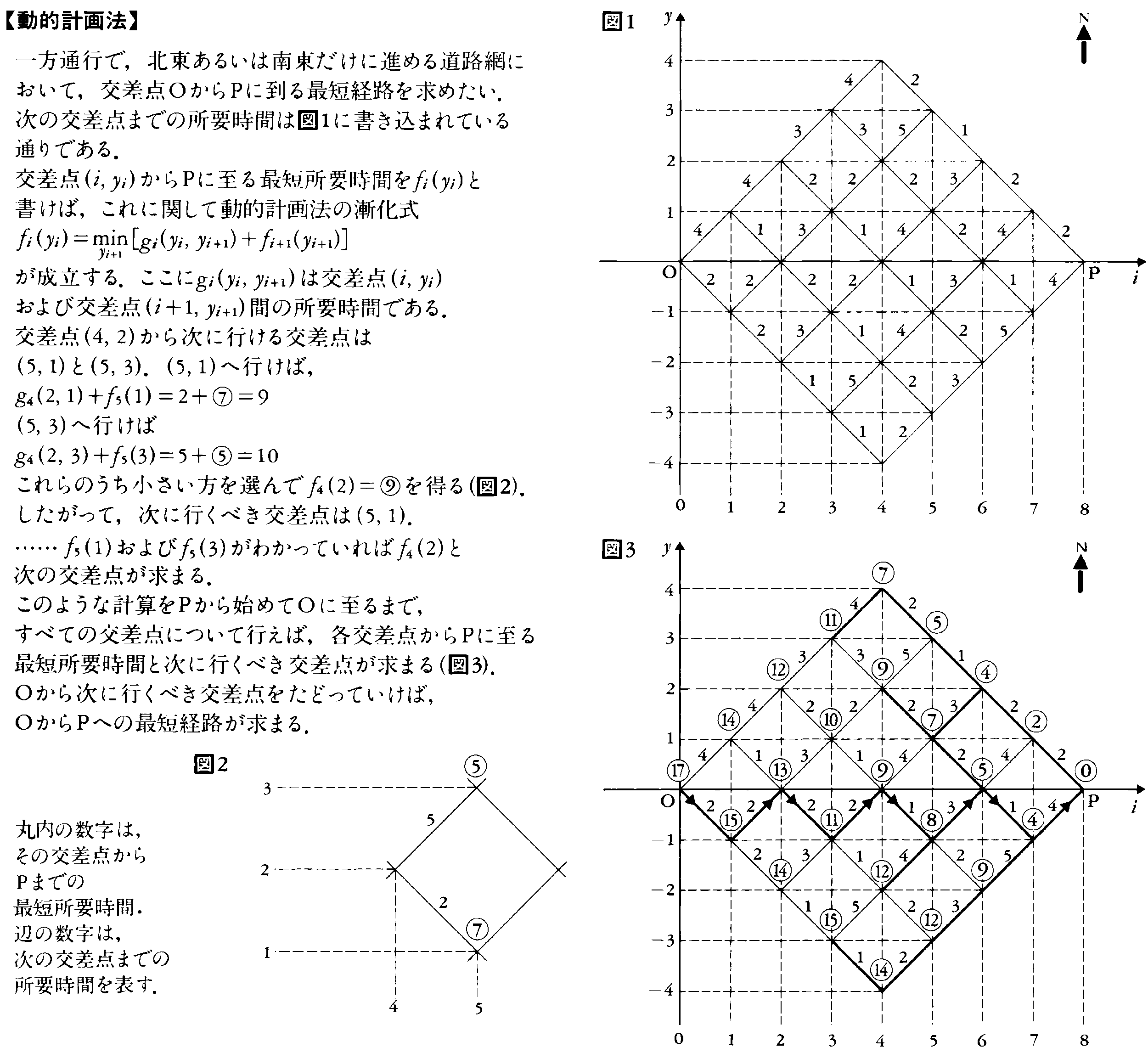
例をあげてみよう。図1のような道路網を考える。一方通行で北東あるいは南東だけに進める。土地に高低の差があり,交差点から次の交差点まで行くのに要する時間が場所によって異なるので,交差点Oから交差点Pへ最短時間で到達する経路を求めたい。
交差点(i,yi)と次の交差点(i+1,yi+1)に行くときに要する時間は図に書かれている通りであるが,これをgi(yi,yi+1)と書けば(例,g3(1,2)=2),OからPに到る一つの経路y0(=0),y1,y2,……,y8(=0)に対する所要時間は
g0(y0,y1)+g1(y1,y2)+……+g7(y7,y8) ……(1)
と書ける。問題はこの式を最小にするy1,y2,……,y7を求めることになる。もっとも,次にどの交差点に行けるのかは場所によって異なるので,交差点(i,yi)の次に行ける交差点の集合をMi(yi)と書くことにすれば,y1,y2,……,y7のおのおのはyi+1∈Mi(yi)をみたすものでなければならない(例,y2=0ならばM2(0)={1と-1},y3は+1または-1)。ところで,人が交差点にさしかかるたびに次に向かうべき交差点を選ぶものと考えれば,この問題は8段階(i=0,1,……,7)にわたる多段決定過程と考えることができる。ここで,交差点の横座標iが決定の段階になるのは図からも明らかであろう。
この考えを数学的に定式化するために,問題をちょっと一般化して,いま決定のi段目に交差点yiにいるものとして,それ以後最終点Pに到るまでの経路を最適にする問題を考えて式の形にまとめれば,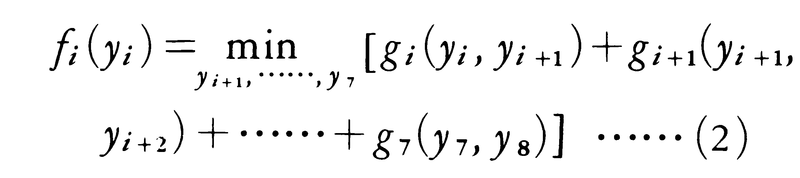
となる。ここで,右辺の[ ]内はyiからPに到る経路yi,yi+1,……,y8の所要時間であるから,左辺の関数fi(yi)は交差点(i,yi)からPまでに到る最短時間を示している。最終段階では,選択の余地がないから,
f7(y7)=g7(y7,y8)=g7(y7,0)(境界条件) ……(3)
となる。またi=0とすれば(2)式は交差点OからPへの最短経路を求めるもとの問題となる。
(2)式について〈動的計画の漸化式〉とよばれる次の漸化式が成立する。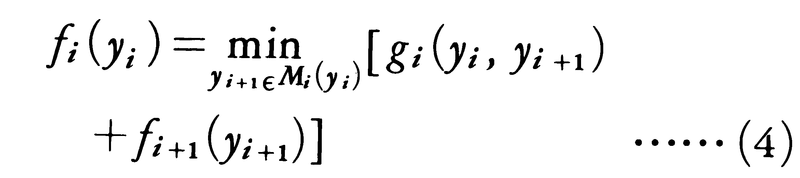
この式は次のように解釈できる。交差点yiからPに到る最適経路は,次の交差点yi+1からPに到る後半の部分も,yi+1から始まってPに到る最適経路になっているはずである(ベルマンの最適性の原理)。そこで,yiからyi+1を通過し,yi+1以降は最適な経路をたどるときの所要時間((4)式の[ ]内)が最小になるようなyi+1を求めれば,これが次に通過すべき“最適な”交差点であり,その値こそはyiからPに到る最小の所要時間fi(yi)である。
(1)式のような最小(大)化問題を多段決定過程として,このような漸化式を導いて解を求めるのが動的計画法である。解を求めるには,普通,(3)式のような境界条件から始めて,漸化式を段階とは逆順に計算していく。上の例の場合には特に簡単で,図2,図3に示すように図上の一対比較で計算できるが,一般の場合でも,他によい方法がなければ,コンピューターによる総当り法も使える。得られた解はもとの問題の答を与えるばかりでなく,初期条件の変化の影響の見積り等にも役立つ。上の例でいえば,Oからの最適経路からはずれることがあっても,そのときの交差点からの最短経路が与えられている(図3)。このような感度分析が容易なのも動的計画法の特徴である。
執筆者:柳井 浩
出典 株式会社平凡社「改訂新版 世界大百科事典」改訂新版 世界大百科事典について 情報
Sponserd by ![]()
探索問題を解くための技法の一つ。探索空間中の異なる解が共通の部分問題をもつ場合に、その部分問題の解をメモリー上に蓄えることによって、同じ部分問題が繰り返し解かれないようにすることで効率をあげる。たとえば、東京から福岡までの最短経路を求める際、ある経路の探索の結果、大阪から福岡までの最短経路が得られたとする(部分問題の解)。この場合、別の経路の探索中に大阪に達したら、その後福岡までの最短経路はすでにわかっているので、あらためて計算する必要がない。これが動的計画法の基本的な考え方である。同じ部分問題が組合せ的に現れるために、単純な深さ優先探索や幅優先探索アルゴリズムでは指数関数的な計算時間がかかる場合でも、動的計画法によって多項式時間で計算できることがあり、その効果は絶大である。グラフの最短経路を求めるアルゴリズムとしてよく知られるダイクストラ法は、動的計画法のよい例である。
[丸山 宏 2019年4月16日]
出典 小学館 日本大百科全書(ニッポニカ)日本大百科全書(ニッポニカ)について 情報 | 凡例
Sponserd by ![]()
出典 ブリタニカ国際大百科事典 小項目事典ブリタニカ国際大百科事典 小項目事典について 情報
Sponserd by ![]()
出典 株式会社平凡社百科事典マイペディアについて 情報
Sponserd by ![]()
…これは,両パターンが最もよく一致するように比較対象の一方の時間軸を非線形に伸縮しながら照合することによって解決できる。これは動的計画法dynamic programmingの技術を用いて実現でき,DPマッチングと呼ばれている。 もう一つの難しい点は,同じ単語でも話者によって発声されたスペクトルパターンが異なる点である。…
…さらに制約条件が付加された場合には,線形計画法や非線形計画法が用いられる。また,多段階にわたる決定問題を対象とする最適化手法として動的計画法がある。 最適化手法は普通,現実問題の数学的模型に対して適用されるもので,現実問題それ自体を解いているのではない点に注意しなければならない。…
※「動的計画法」について言及している用語解説の一部を掲載しています。
出典|株式会社平凡社「世界大百科事典(旧版)」
Sponserd by ![]()
福岡県福岡市博多区の櫛田神社の夏祭り。壮麗な山笠で知られる。今日,山笠には飾り山笠と舁き山笠(かきやまがさ)の 2種類がある。明治時代に電線が架設されて以降,物語場面の人形などを飾りつけた高さ 15m...