自動操舵装置
じどうそうだそうち
船舶や航空機で、命令された針路、高度を保つように自動的に操舵する装置。オートパイロットautopilotともいう。本項では船舶を中心に記述するが、航空機については「オートパイロット」の項を参照されたい。
命令される針路には、予定された直進針路、希望の針路に変針する変針針路があり、前者の操舵を自動直針操舵、後者を自動変針操舵といい、この二つが自動操舵装置の基本的な機能である。このほか、手動操舵、遠隔操舵、非常操舵などができるものが多い。
1920年ドイツでアンシュッツ式のオートパイロットが、21年アメリカでスペリー式が開発された。22年、スペリー社の「ジャイロパイロット」の商品名をつけたオートパイロットが、アメリカのムンソン汽船会社のムナーブ号に実用化第一号として装備された。日本では22年(大正11)山下汽船の北米丸がスペリー式ジャイロコンパスを取り付け、就航後オートパイロットを採用した。
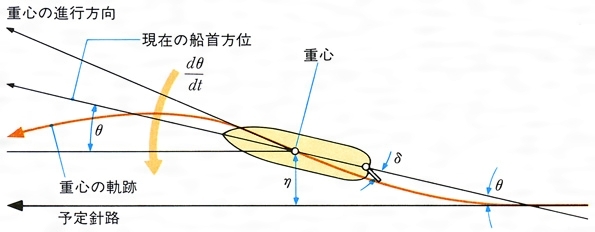
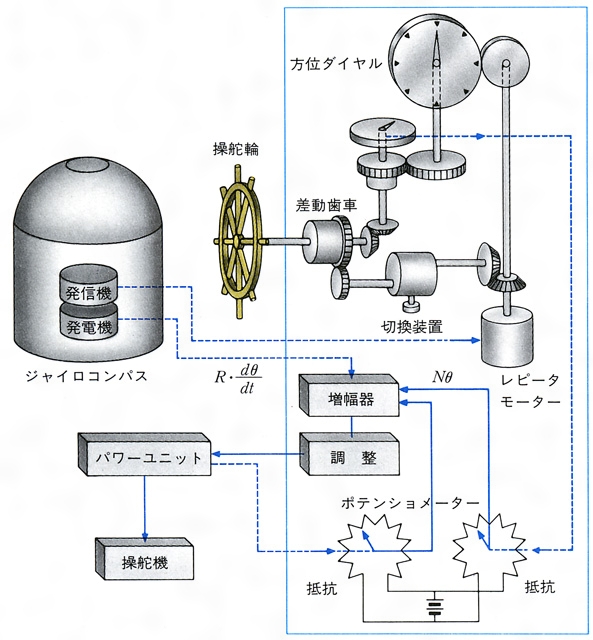
熟練した操舵手は、コンパスによって針路が偏ったことを知ると、針路を戻すように操舵する。針路が戻り始めると舵(かじ)も元に戻すが、針路の戻り角と舵の戻り角とを比例させて、針路がちょうど元の針路に復したとき操舵量もゼロとなるように操舵する方法を比例操舵という。比例操舵をすると、慣性のために船首は元の針路を越えて反対側に振れてしまう。この反対側への振れを防ぐには、船首が元の針路に戻る前に舵を反対側に操舵する当て舵を行う。操舵手は比例操舵と当て舵とを上手に使って、船首が所定の針路を保つように操舵するのである。オートパイロットには、操舵手がコンパスを見たり、適当な角度の当て舵をとるときの勘を、具体的に信号の形で与え、演算によって最適な動きを算出し舵を制御するようにしなければならない。いま船首の予定針路からのずれ角をθとすると、比例操舵はNθで表される(図)。また当て舵操舵は船首振れ角の角速度に比例する操舵で、R・dθ/dtである。したがって操舵角δは
δ=Nθ+R・dθ/dt
で与えればよい。NとRは比例定数である。Nは船首1度の偏角に対して何度の舵角をとらせるかを決める定数で、舵角調整といわれる。Rは1秒当り1度の角速度に対し何度の舵角をとらせるかを決める定数で、当て舵調整とよばれる。偏角信号θはジャイロコンパスや磁気コンパスから得られる。dθ/dtの信号はθの信号を電気的微分器にかけて得る。最近のオートパイロットでは、この二つの信号のほかにI∫θdtという積分要素を付加する場合が多い。積分要素は、風などで船が一方に流されるのを防ぐために舵に一定の操舵角を与えるのに必要である。従来は、操舵の回数が多くなっても、命令された針路を忠実に保針することが要求されていた。しかし、操舵すると舵の抵抗のために速力が落ち、エネルギーをむだに消費することになる。最近では次の式の評価関数を最小にするように操舵することがオートパイロットに求められている。
J= 2+λ
2+λ 2
2
2は偏角の二乗平均値、2は操舵角の二乗平均値である。λは重み関数である。
最近のオートパイロットは、測位システムやコンピュータと組み合わせて、予定された航路上を自動的に航海できるような総合航海システムになってきた。
[飯島幸人]
出典 小学館 日本大百科全書(ニッポニカ)日本大百科全書(ニッポニカ)について 情報 | 凡例
Sponsored by 
自動操舵装置 (じどうそうだそうち)
autopilot
オートパイロットともいう。船や飛行機の針路,あるいは高度を自動的に保持するよう舵取りを行う装置。決められた針路からはずれた場合,その逆方向へ舵を取ることによって針路を修正する。ヨットの場合,風向に対し一定の方向に進むようウィンドベーンと舵をリンクする装置がくふうされ古くから使われている。
船や飛行機の運航においては,出発地から目的地までどのような経路をとって進むかについての航路計画がまず行われる。次に計画航路上に適当な間隔で点を選び,それらの各点を折線状に結ぶ形で実際の運航が行われる。したがって,運航中の大部分の時間は決められた直線上に船や飛行機を保持する制御が行われているわけで,自動操舵はもっとも基本的な制御となっている。直線上への制御といっても,海や空に線が引かれているわけではなく,その線の方向へ針路を保つ制御が基本である。磁気コンパスやジャイロコンパスで自分が進んでいる方向が目標針路と一致しているかどうかを計測し,偏差があればコンパスからの信号に基づいてそれを修正する方向へ舵が制御される。この方法では,予定航路と並行に進んでいることは保証されるが,潮流や風によって生ずる航路からの横方向へのずれを回復することはできない。このためには,適当な時間間隔で位置を測定し,予定航路からはずれている場合は次の位置測定時刻までには予定航路上に戻るよう設定針路の修正を行う。位置測定は,天文航法しかなかった時代は1日に3回程度しか行えず精度も悪かったが,電波航法,衛星航法などの技術により,短い時間間隔で精度よく行うことができるようになった。慣性航法を利用すれば,常時位置を知ることができるため,針路と位置を同時に制御する自動操舵装置をつくることができる。
目標航路からの偏差を検出し,それを修正するように舵を取るといっても,舵の取り方は運航の局面によって異なる。港の中や交通量の多い場所,あるいは複雑な地形の場所では航路を正確に保持することは安全上非常に重要である。しかし,その他の場所では予定航路から多少はずれてもそれ自体は大きな問題ではない。神経質に舵を取ると,それによって抵抗が増加し速力低下,あるいは燃料消費の増大をもたらすことになる。
最近では,このような運航の局面に合わせて舵の取り方をかえる,あるいは外乱の状況に合わせて制御方式をかえる適応制御の考え方がとり入れられるようになっている。さらに,航路計画,位置測定,針路修正,衝突回避など自動操舵に関連する諸機能を総合した自動操縦システムへと進みつつある。
→自動飛行制御システム
執筆者:小山 健夫
出典 株式会社平凡社「改訂新版 世界大百科事典」改訂新版 世界大百科事典について 情報
Sponsored by
百科事典マイペディア
「自動操舵装置」の意味・わかりやすい解説
自動操舵装置【じどうそうだそうち】
オートパイロット,ジャイロパイロットとも。船や飛行機の針路,高度を自動的に保持する装置。所定のコースからはずれたとき,ジャイロコンパスなどによって,その角変位と角速度を検出し,自動的にこれに対応する舵角を舵に与え,針路を修正する。
→関連項目オートパイロット|操舵装置
出典 株式会社平凡社百科事典マイペディアについて 情報
Sponsored by
自動操舵装置
じどうそうだそうち
autopilot; autosteerer
船舶が規定針路を離れたとき,自動的に適切な舵をきって,もとの針路に戻し,常に一定の方向に進ませる装置。磁気コンパスを基準とする磁気コンパス・パイロットと,ジャイロコンパスを基準とするジャイロ・パイロットがあり,それぞれ磁気コンパスとジャイロコンパスとから方位に関する信号を受けて,舵を動かす。 1922年ジャイロ・パイロットが実用化され,その後舵に改良が加えられて,最近のものは常に適切な舵取りが自動的に与えられるようになっている。磁気コンパス・パイロットは,おもに小型,中型船用に使われている。
出典 ブリタニカ国際大百科事典 小項目事典ブリタニカ国際大百科事典 小項目事典について 情報
Sponsored by
世界大百科事典(旧版)内の自動操舵装置の言及
【船舶自動化】より
…
[自動化の変遷]
自動化の変遷の過程を大別すれば,機能モジュール開発期,遠隔制御導入期,計算機制御期およびシステム開発期の四つとなる。 機能モジュール開発期の代表例には[自動操舵装置](オートパイロット)があげられる。このオートパイロットは,自動制御を実用化した装置としての地位も高い。…
※「自動操舵装置」について言及している用語解説の一部を掲載しています。
出典|株式会社平凡社「世界大百科事典(旧版)」
Sponsored by