
改訂新版 世界大百科事典 「リンク装置」の意味・わかりやすい解説
リンク装置 (リンクそうち)
link mechanism
いくつかの剛体をピンなどで結合して相対運動が可能なようにした機械部品の組合せは,身の回りにも広く利用されている。ミシンの踏板の動きが針に伝えられて針に上下運動をさせたり,自転車のブレーキレバーの動きがブレーキシューやブレーキ帯の動きに伝えられるのも,すべてこのような剛体(細長い棒の形が多い)が連結された機構の利用によるものである。この例のように,数個の剛体を回転自在のピンで結合して,各部分の動きと位置が一義的に決まるような運動(これを拘束された相対運動という)を行うようにした機構を一般にリンク装置またはリンク機構といい,その構成要素をリンクあるいは節と呼ぶ。リンクは引張力および圧縮力のいずれに対しても剛性をもっており,運動の伝達はかなり自由な方向に行うことができ,結合部の摩擦を小さくすることも比較的容易であるため,伝える力の大きさに比べ全体の構造が軽くなる。また,機構の製作精度を高めることにより運動を正確に伝えることもできるので,その利用範囲は非常に広い。
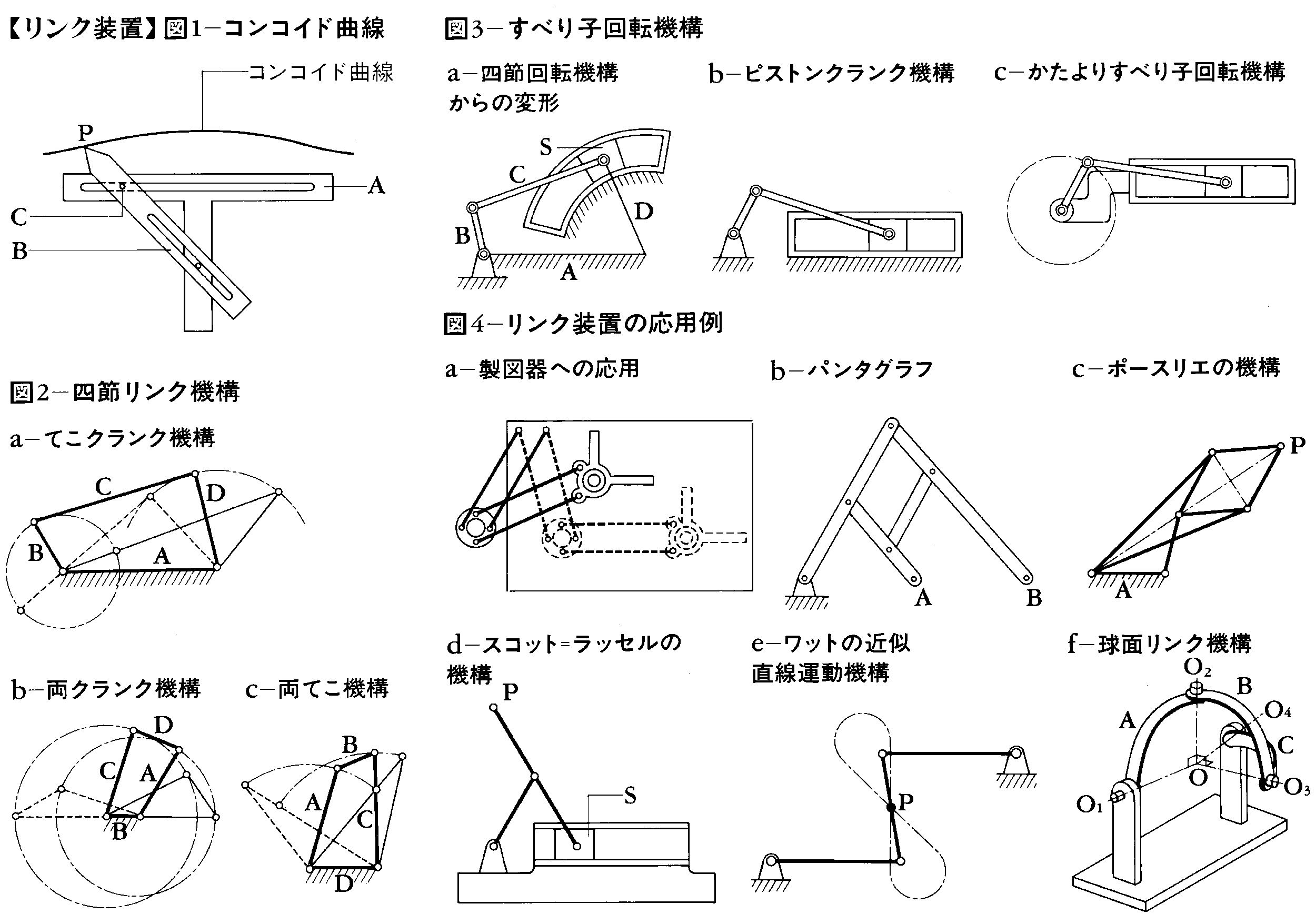
リンク装置の古い利用例としては,コンコイド曲線の発見者のニコメデスNikomedesによるものがある(前2世紀ころ)。コンコイドとは図1のように定規B上の点Cが,定規Aの溝に沿って動くとき,定規Bの先端Pが描く曲線のことである。この曲線は任意の角の三等分に利用された。動力機械や作業機械では回転運動と直線往復運動との変換が必要な場合が多いが,ワットの蒸気機関以来,この種の運動変換にはリンク装置が広く利用されている。
四節回転機構
リンク装置のもっとも基本的なものは,4本のリンクが四つのピン結合(軸と軸受からなる回転自由な結合で,まわり対偶という)によって連鎖(チェーン)を構成しているもので,四節回転機構と呼ばれる。この機構では一つのリンクを固定し,もう一つのリンクにある動きを与えると,残りの二つのリンクの動きは定まったものとなる。このように運動が一義的に決定されるものを拘束連鎖という。三つのリンクからなる三節回転機構では相対運動は不可能でそれ自身が剛体と同じになるし,五節回転機構では,一つのリンクを固定するほかに,二つのリンクの動きを定めなければ運動は一義的には定まらない。
固定されたリンクのピンのまわりに回転運動するものをクランク,往復角運動(揺動運動)をするものをてこというが,四節回転機構では,どのリンクを固定するかによって機構の動きが大きく異なり,てこクランク機構,両クランク機構(二重クランク機構ともいう),両てこ機構の種類がある。図2において,いずれもリンクA,B,C,Dの長さをそれぞれa,b,c,dとし,c>a>d>b,a+d>b+c,c+d>a+bの関係にあるものとする。このとき,A(またはC)を固定すると,Bはクランク,Dはてことなる(図2-a)。これはてこクランク機構と呼ばれ,多くの機関に利用される。リンクB(最短のもの)を固定すると,図2-bのようにA,Cともにクランクとなり,両クランク機構と呼ばれる。両てこ機構はリンクDを固定した場合に実現され,A,Cがともにてことなる。
すべり子回転機構
案内面に沿ってその軸線方向にのみ相対運動を行う(すべり対偶という)ものをすべり子,またはスライダーといい,クランクとすべり子をもつ機構をすべり子回転機構と呼ぶ。この機構は前述の四節回転機構を少し変形することにより得られる。すなわち,図3-aにおいて,リンクDの上端のピンは円弧運動をするので,リンクA,Dをなくして,円弧状の溝の中を動くすべり子Sを用いた運動に置きかえることができる。図3-bは,aにおいてリンクDの長さが無限大になって回転の中心は無限遠方に移動した場合と考えることができ,すべり子は直線運動することになる。これはピストンクランク機構と呼ばれ,ピストンエンジンや往復圧縮機などに利用される。シリンダーの中心線がクランクの回転中心からずれたものが図3-cで,かたよりすべり子回転機構と呼ばれている。すべり子の往と復とで運動速度が異なるので,工作機械の早戻り機構に利用される。
リンク装置の応用
(1)平行運動機構 平行四辺形をなした四節回転機構を利用すれば,リンク装置内の2個あるいは2個以上の点をつねに平行運動させることが容易にできる。図4-aは製図用の定規を平行移動させるのに利用した例。図の拡大・縮小に用いられる図4-bはパンタグラフと呼ばれるものである。図4-bでA点で原図をトレースするとB点は拡大図を,逆にB点で原図をトレースするとA点は縮小図を描く。(2)直線運動機構 機械の1点に直線運動を行わせるためのリンク装置。代表的なものは図4-cのポースリエの機構で,リンクAを固定してP点に直線運動を行わせる。これは,正しい直線運動を実現するので,後述の近似的なものに対して真正(厳正)直線運動機構と呼ばれる。図4-dはスコット=ラッセルの機構で,P点が直線運動を行う。すべり子Sは直線状の溝に沿って動くが,この動きを十分に長いリンクの回転運動に置き換えたものが近似直線運動機構として用いられる。このほかよく知られているものに,図4-eのワットの近似直線運動機構がある。P点の直線に近い動きをする部分を利用するもので,ワットはこれを蒸気機関のシリンダーの動きとして利用した。(3)空間リンク装置 三次元空間で運動するリンク機構で,これも広く用いられている。図4-fは,球面上に構成されたリンク機構で,球面リンク機構と呼ばれる。球面リンク機構が動くためには,二つのリンクを結合するピン軸の中心線のすべてが球の中心を通らなければならない。OO1軸まわりにリンクAを回転させると,リンクCはOO4軸まわりに回転する。交差する軸に回転を伝える機構として利用されるが,実際には十文字形の部品を使ってがんじょうに作り,フックの自在継手として,自動車のエンジンの回転を車軸に伝達する場合などに使われている。(4)ロボットへの応用 最近は塗装ロボット,溶接ロボットなどの工業用ロボットにおいて,複雑な動きを実現させるためにリンク装置の利用が盛んになっている。
執筆者:三浦 宏文
出典 株式会社平凡社「改訂新版 世界大百科事典」改訂新版 世界大百科事典について 情報
Sponserd by ![]()