
改訂新版 世界大百科事典 「安定性」の意味・わかりやすい解説
安定性 (あんていせい)
stability
安定性ということばは,自然科学,工学の各分野で用いられることばであるが,ここでは制御工学やシステム工学における安定性について述べる。システムがなんらかの原因で定常状態からずれたとしても,時間の経過とともにいつか元の状態に戻ることができるとき,そのシステムは漸近安定asymptotically stableであるという。
制御系の安定性が学問的な対象として取り上げられたのは,J.ワットの発明した蒸気機械の調速機についてであった。これはエンジンの回転速度を一定に保つための装置であり,蒸気弁の開度を調整する一種のフィードバック制御装置であった。この調速機とエンジンから成るシステムの運動を微分方程式で記述すると,目標となる一定の回転速度はその微分方程式の平衡解を与えていることがわかる(微分方程式の解で,時間によらず一定値をとる解が存在するとき,それを平衡解あるいは平衡点という)。さて,なんらかの原因で回転速度が少しずれても,その後外乱が加わらないかぎり,フィードバック機構のおかげでそのずれが時間の経過とともに修正され,やがてエンジンの回転速度は目標の速度に落ち着くことができれば,システムは安定であるといえよう。数学のことばでは,初期点が平衡点から任意にずれていても,その常微分方程式の解軌道が時間の経過とともに平衡点に限りなく近づくとき,その方程式の平衡点は漸近安定であるという。言い換えると,調速機の効用は,それを含むエンジン全体のシステムを表す微分方程式の平衡解(目標の一定回転速度)の漸近安定性にかかっていることがわかる。
とくに,システムの微分方程式が線形で,かつ定係数のとき,その固有方程式は代数方程式になるが,漸近安定性が保証されるための必要十分条件はその代数方程式の根がすべて負の実部をもつこととなる。こうして,一般に与えられた代数方程式
xn+a1xn⁻1+a2xn⁻2+……+an-1x+an=0
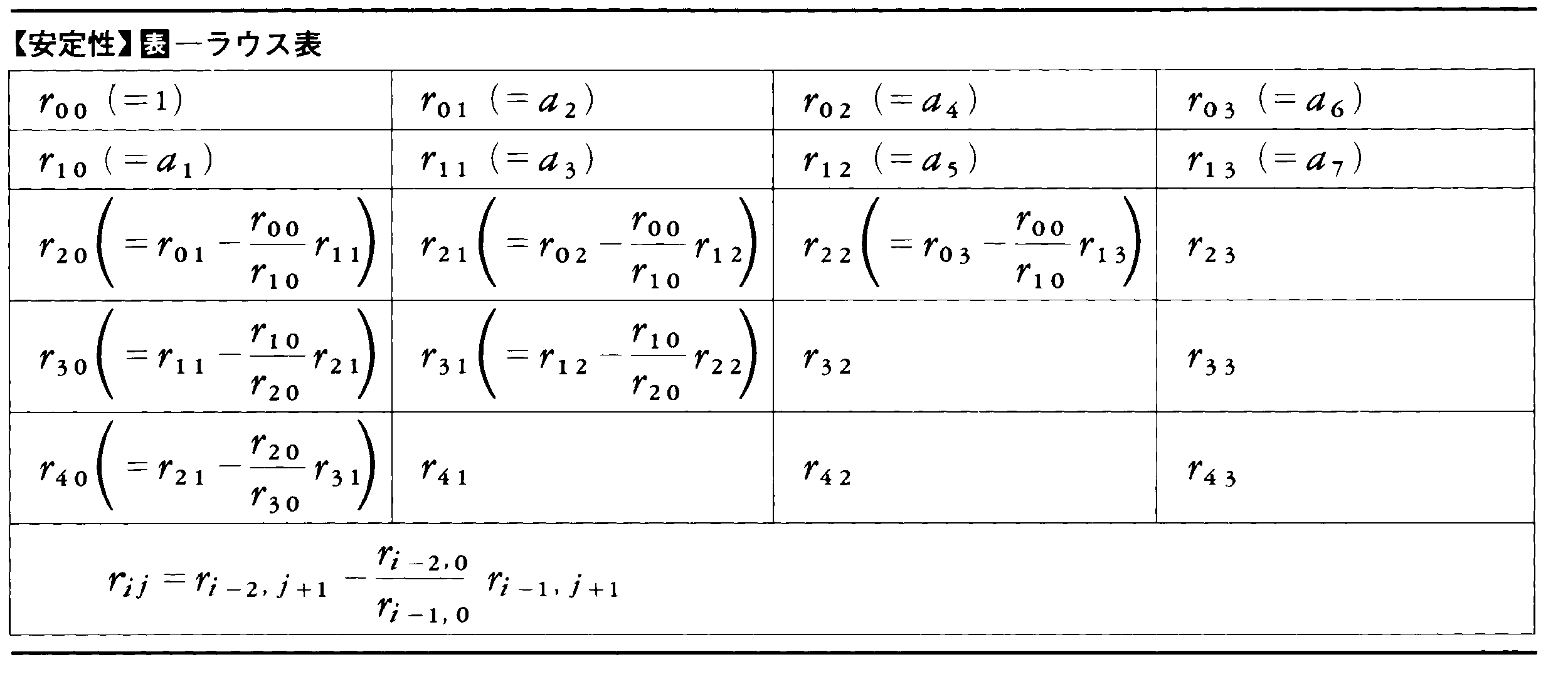
のすべての根が負の実部をもつために係数a1,a2,……,anが満足しなければならない必要十分条件を見つけることが問題になった。1877年ラウスE.J.Routhはこの問題をみごとに解決した。
上述した代数方程式が二次の場合,二次方程式の根と係数の関係から,この根の実部が負になるためには,a1>0かつa2>0となることが必要にしてかつ十分である。次数nがもっと高い一般の場合,ラウスは係数の間でそれぞれn2回の乗除算と加減算を行って表(これをラウス表という)を作り,その左端の欄のri0がすべて正であれば,すべての根は負の実部をもつことを示した。たとえば,n=3のとき,その条件はr10=a1>0,r20=a2-a3/a1>0,r30=a3>0となる。この方法をラウスの安定判別法と呼んでいる。95年フルビッツA.Hurwitzは,代数方程式の係数から成る行列を作り,そのすべての主座小行列式の正負を判別することによって漸近安定性をチェックする方法を提案したが,その後これはラウスの方法と同じものになることが示されるに及び,これをラウス=フルビッツの安定判別法と呼んでいる。
他方,線形の差分方程式の漸近安定性の必要十分条件は,その固有方程式の根の絶対値がすべて1より小さいこととなるが,そのための判別法は1900年代になってシュールI.SchurとコーンA.Cohnによって研究され,シュール=コーンの安定判別法として知られている。
フィードバック制御系では,制御対象が本来漸近安定であっても,フィードバックを行うことによってシステムが不安定になることがある。したがって,フィードバック制御系の設計には安定性のチェックが不可欠であるが,それには1932年ナイキストH.Nyquistによって作図に基づく簡便な方法が示されている。しかし,ディジタル制御方式が普及しつつある今日では,ナイキストの安定判別法よりもむしろ古典的なラウスの安定判別法が有力になりつつある。
今まで紹介した方法はすべて線形微分方程式に対してのみ有効であったが,1892年ロシアのリャプノフA.M.Lyapunovは非線形の微分方程式にも適用できる新しい安定判別法を提案していた。しかし,当時の西ヨーロッパではあまり注目されず,1950年代後半にアメリカで再発見され,新しい発展をみた。リャプノフの方法は,リャプノフ関数と呼ばれるある正定値関数が存在し,その時間微分が負定値関数になると,平衡点の漸近安定性が保証されるというものであり,リャプノフの直接法とも呼ばれる。ここに,平衡点は与えられた正定値関数が0の値をとる唯一の点でなければならない。リャプノフのアイデアは,微分方程式の解軌道は自然に平衡点に近づかねばならないという理屈に基づいている。つまり,リャプノフ関数は一種のエネルギーの役目を果たし,システムの漸近安定性は,システムがエネルギー値の最も小さい状態に近づくことを調べることによって保証されるのである。こうして,問題は与えられたシステムに対してリャプノフ関数を見いだすこととなるが,線形微分方程式の場合にはリャプノフ関数の存在と漸近安定性が1対1に対応することが示されている。また,非線形微分方程式の場合には,その対象となるシステムの物理的属性に基づいてリャプノフ関数を構成する方法が個別的にいろいろと提案されている。
物理的なシステムでは,当初は安定であっても,環境の変化や故障などによってシステム内部のパラメーターが変化し,安定性が失われる可能性もある。その場合,パラメーターを自律的に調節してつねに安定化する機構をシステム内部に備えておくとつごうが良い。このような機構を設計し付与したとき,システムは超安定ultrastableであるといわれる。また,理論的には,パラメーターがある範囲内でどのように変わっても安定性が保証されるとき,そのシステムは超安定であるということもある。
執筆者:有本 卓
出典 株式会社平凡社「改訂新版 世界大百科事典」改訂新版 世界大百科事典について 情報
Sponserd by ![]()