デジタル大辞泉 「座標」の意味・読み・例文・類語
ざ‐ひょう〔‐ヘウ〕【座標】
Sponsored by ![]()
翻訳|coordinate
Sponsored by ![]()
出典 精選版 日本国語大辞典精選版 日本国語大辞典について 情報 | 凡例
Sponsored by ![]()
直線,平面,空間における点に数または数の組を対応させて点の位置を表すしくみを座標系といい,点に対応する数または数の組をその点の座標という。座標を初めて考えたのはR.デカルトであり,彼はそれによって解析幾何学を創始し,幾何学的な図形を数の関係で表して幾何学を代数を用いて研究するという方法を開発したのである。この方法はその後に生まれた多くの幾何学の研究にも用いられ,それらに応じて各種の座標が導入された。以下ではそのうちの初等的なものについて述べる。
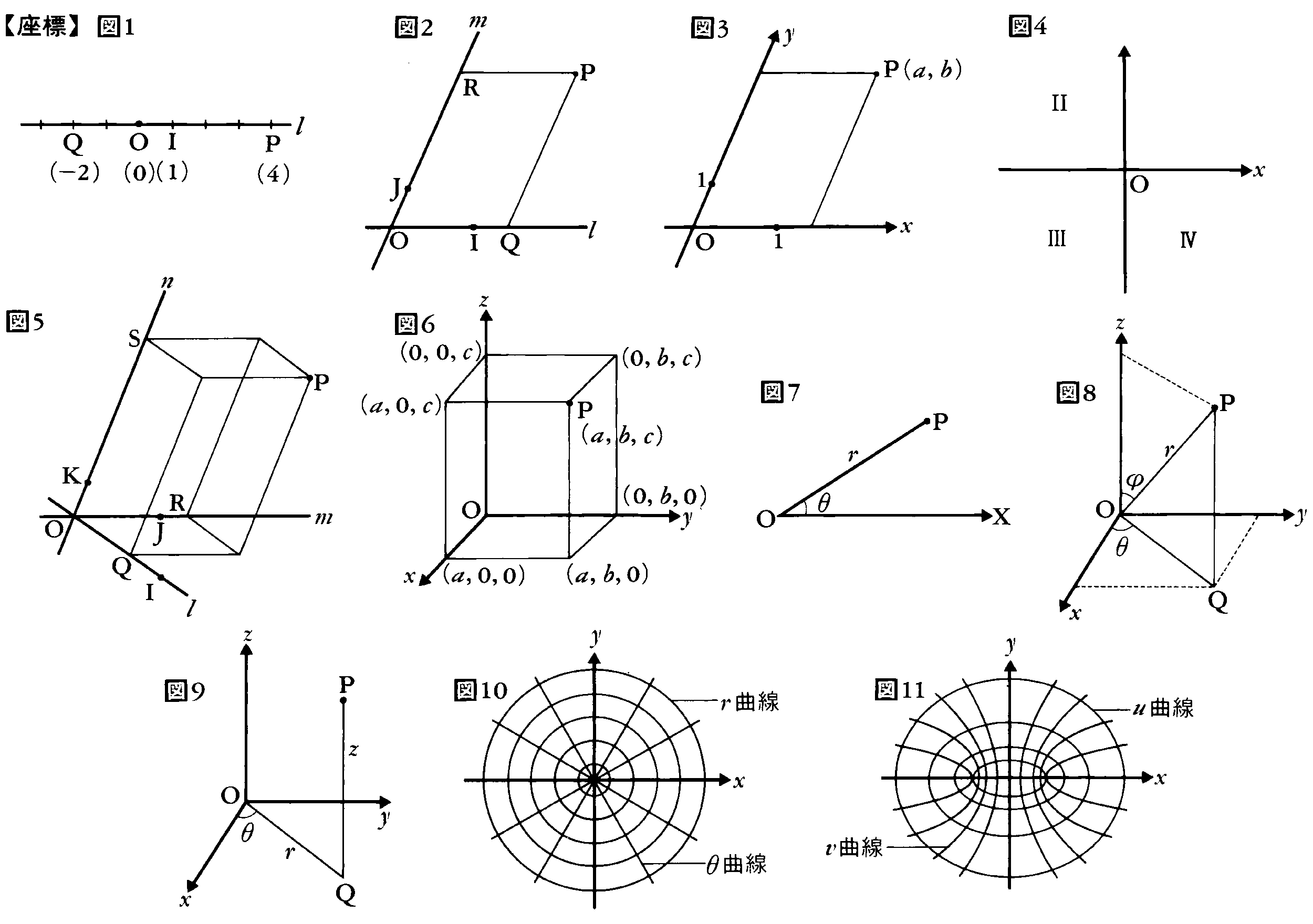
まず直線上に座標を導入しよう。lを一つの直線とし,l上に2点O,Iを任意に定める。そして,l上に点Pがあるとき,線分OPの長さを線分OIを単位として測り,PがOに関してIと同じ側にあるか反対側にあるかに応じて,それに+または-の符号をつける。この数を点Pに対応させるとき,l上の点と実数とが1対1に対応して,直線l上の座標系が得られる。Oをこの座標系の原点,Iをその単位点といい,OからIに向かう向きをこの座標系の正の向きという。点Pの座標がaであることをP(a)で表す(図1)。
次に,平面上に座標を導入しよう。πを一つの平面とし,π上に3点O,I,Jを同一直線上にないように定め,OとIを通る直線をl,OとJを通る直線をmとする。そして,π上に点Pがあるとき,Pを通りmに平行な直線がlと交わる点をQ,Pを通りlに平行な直線がmと交わる点をRとして,Oを原点としIを単位点とするl上の座標系に関するQの座標をa,Oを原点としてJを単位点とするm上の座標系に関するRの座標をbとする(図2)。いま,点Pに実数の組(a,b)を対応させれば,π上の点と二つの実数の組が1対1に対応して,平面π上の座標系が得られる。これを平行座標系といい,Oをその原点,IとJをその単位点,lとmを座標軸という。lは横軸またはx軸,mはy軸または縦軸と呼ばれる。平行座標系における点の座標はデカルトにちなんでカルテシアン座標Cartesian coordinatesとも呼ばれる。点Pの座標が(a,b)であることをP(a,b)で表し,aをPのx座標または横座標,bをPのy座標または縦座標という。通常は平行座標系を表示するのに,原点Oと正の向きを矢印で示したx軸,y軸だけをもってし,必要があるときのみ単位点を1で表示する(図3)。もっともよく用いられる平行座標系は,両座標軸が直角に交わり,OIとOJの長さが平面上の長さの単位に等しいもので,これを直交座標系orthogonal coordinatesと呼んでいる。これに対し一般の平行座標系を斜交座標系skew coordinatesという。直交座標系では両座標軸の正の向きは,x軸を原点Oのまわりに時計の針のまわる向きと反対の向きに90度回転したときに,x軸の正の向きとy軸の正の向きが一致するように選ばれているのが通常である。このとき,両座標軸により分かたれる平面の四つの部分のおのおのを象限といい,図4のⅠ,Ⅱ,Ⅲ,Ⅳの部分を第1,第2,第3,第4象限という。各象限で座標の符号は一定で,第1象限では(+,+),第2象限では(-,+),第3象限では(-,-),第4象限では(+,-)となる。点Pの直交座標はPからy軸,x軸までの距離にPの属する象限の符号をつけたものである。直交座標系では,2点P(a,b),P′(a′,b′)の間の距離は, で与えられる。空間にも平行座標系が次のように導入される。空間内に4点O,I,J,Kを同一平面上にないように定め,OとI,OとJ,OとKを通る直線をそれぞれl,m,nとする。そして空間内に点Pがあるとき,Pを通りmとnが定める平面に平行な平面がlと交わる点をQ,Pを通りnとlが定める平面に平行な平面がmと交わる点をR,Pを通りlとmが定める平面に平行な平面がnと交わる点をSとして,Oを原点としIを単位点とするl上の座標系に関するQの座標をa,Oを原点としJを単位点とするm上の座標系に関するRの座標をb,Oを原点としKを単位点とするn上の座標系に関するSの座標をcとする(図5)。いま,点Pに実数の組(a,b,c)を対応させれば,空間の点と三つの実数の組が1対1に対応して空間の座標系が得られる。これが空間の平行座標系と呼ばれるもので,Oをその原点,I,J,Kをその単位点という。lをx軸,mをy軸,nをz軸といい,これらを総称して座標軸という。lとmの定める平面をxy平面,mとnの定める平面をyz平面,nとlの定める平面をzx平面といい,これらを総称して座標平面という。点Pの座標が(a,b,c)であることをP(a,b,c)で表し,a,b,cを点Pのx座標,y座標,z座標という。空間の平行座標系は原点Oと正の向きを矢印で示したx軸,y軸,z軸だけで表示されるのが通常である。よく用いられるのは,座標軸が互いに直角に交わり,OI,OJ,OKの長さが空間の長さの単位に等しい直交座標系で,さらに座標軸の正の向きは右手系に,すなわち右手の親指の先端をx軸の正の向きに,人差指の先端をy軸の正の向きに向けたときに,中指の先端がz軸の正の向きに向くように選ぶのがふつうである。点Pの直交座標が(a,b,c)のとき,a,b,cはPからyz平面,zx平面,xy平面までの距離に+または-の符号をつけたものである(図6)。直交座標が(a,b,c),(a′,b′,c′)である2点間の距離は,
で与えられる。空間にも平行座標系が次のように導入される。空間内に4点O,I,J,Kを同一平面上にないように定め,OとI,OとJ,OとKを通る直線をそれぞれl,m,nとする。そして空間内に点Pがあるとき,Pを通りmとnが定める平面に平行な平面がlと交わる点をQ,Pを通りnとlが定める平面に平行な平面がmと交わる点をR,Pを通りlとmが定める平面に平行な平面がnと交わる点をSとして,Oを原点としIを単位点とするl上の座標系に関するQの座標をa,Oを原点としJを単位点とするm上の座標系に関するRの座標をb,Oを原点としKを単位点とするn上の座標系に関するSの座標をcとする(図5)。いま,点Pに実数の組(a,b,c)を対応させれば,空間の点と三つの実数の組が1対1に対応して空間の座標系が得られる。これが空間の平行座標系と呼ばれるもので,Oをその原点,I,J,Kをその単位点という。lをx軸,mをy軸,nをz軸といい,これらを総称して座標軸という。lとmの定める平面をxy平面,mとnの定める平面をyz平面,nとlの定める平面をzx平面といい,これらを総称して座標平面という。点Pの座標が(a,b,c)であることをP(a,b,c)で表し,a,b,cを点Pのx座標,y座標,z座標という。空間の平行座標系は原点Oと正の向きを矢印で示したx軸,y軸,z軸だけで表示されるのが通常である。よく用いられるのは,座標軸が互いに直角に交わり,OI,OJ,OKの長さが空間の長さの単位に等しい直交座標系で,さらに座標軸の正の向きは右手系に,すなわち右手の親指の先端をx軸の正の向きに,人差指の先端をy軸の正の向きに向けたときに,中指の先端がz軸の正の向きに向くように選ぶのがふつうである。点Pの直交座標が(a,b,c)のとき,a,b,cはPからyz平面,zx平面,xy平面までの距離に+または-の符号をつけたものである(図6)。直交座標が(a,b,c),(a′,b′,c′)である2点間の距離は, である。
である。
平面上に1点OとOからでる半直線OXを定めるとき,この平面上の点Pの位置は,線分OPの長さrと半直線OPの半直線OXからの角θによって表される。(r,θ)をPの極座標といい,rを動径,θを偏角という。このとき,Oを原点または極といい,半直線OXを原線という(図7)。Pが原点と一致するときはr=0であるが,θは定まらない。r≠0のときも,θの代りにθに2πの倍数を加減したものをとってもかまわない。OからXに向かう向きをx軸の正の向きとする直交座標系をとるとき,点Pの直交座標(x,y)と極座標(r,θ)の間には関係式x=rcosθ,y=rsinθが成り立つ。空間に直交座標系が与えられたとき,空間の点Pからxy平面へ下ろした垂線の足をQとして,線分OPの長さをr,半直線OQがx軸の正の向きとなす角をθ,半直線OPがz軸の正の向きとなす角をφとすれば,点Pの位置は(r,θ,φ)で表される(図8)。(r,θ,φ)をPの極座標または球座標spherical coordinatesという。これとPの直交座標(x,y,z)との関係はx=rsinφcosθ,y=rsinφsinθ,z=rcosφで与えられる。Pの位置はまた線分OQの長さrと上のθおよびzの組(r,θ,z)でも表され,これを円柱座標cylindrical coordinatesという(図9)。
空間内に同一平面上にない4点A0,A1,A2,A3が与えられたとき,空間内に1点Oをとり,ベクトル を考えれば,空間内に点Pがあるとき,
を考えれば,空間内に点Pがあるとき, となる実数の組(λ0,λ1,λ2,λ3)が定まり,これはOのとり方によらない。(λ0,λ1,λ2,λ3)を点Pの重心座標という。PがA0,A1,A2,A3を頂点とする4面体の周上または内部にあるとき,λ0≧0,λ1≧0,λ2≧0,λ3≧0で,Pの位置はA0,A1,A2,A3にそれぞれ重さλ0,λ1,λ2,λ3のおもりをおいたときの物理的な重心の位置に一致する。直線上や平面上の重心座標も同様に定義される。
となる実数の組(λ0,λ1,λ2,λ3)が定まり,これはOのとり方によらない。(λ0,λ1,λ2,λ3)を点Pの重心座標という。PがA0,A1,A2,A3を頂点とする4面体の周上または内部にあるとき,λ0≧0,λ1≧0,λ2≧0,λ3≧0で,Pの位置はA0,A1,A2,A3にそれぞれ重さλ0,λ1,λ2,λ3のおもりをおいたときの物理的な重心の位置に一致する。直線上や平面上の重心座標も同様に定義される。
関数x=f(u,v),y=g(u,v)があり,これによって実数の組(x,y)と実数の組(u,v)が1対1に対応しているとき,(x,y)を直交座標にもつ平面上の点Pの座標として,(x,y)に対応する(u,v)がとれる。(u,v)をPの曲線座標という。vを一定にしてuを動かしたときに得られる曲線をu曲線といい,uを一定にしてvを動かしたときに得られる曲線をv曲線という。u曲線とv曲線を総称して座標曲線という。よく用いられる曲線座標は各点を通るu曲線とv曲線が直交するもので,これを直交曲線座標という。x=rcosθ,y=rsinθで与えられる極座標はこの例である(図10)。a,b(a>b>0)が与えられたとき,任意の実数kに対し, は
は を焦点とする楕円または双曲線を表し,平面上の各点Pに対し,Pを通る上の形の楕円と双曲線が一つずつある。これらに対応するkの値がu,vならば,Pの座標として(u,v)をとり,これをPの楕円座標という。楕円座標も直交曲線座標である(図11)。空間の直交曲線座標も平面のそれと同様に定義される。
を焦点とする楕円または双曲線を表し,平面上の各点Pに対し,Pを通る上の形の楕円と双曲線が一つずつある。これらに対応するkの値がu,vならば,Pの座標として(u,v)をとり,これをPの楕円座標という。楕円座標も直交曲線座標である(図11)。空間の直交曲線座標も平面のそれと同様に定義される。
執筆者:中岡 稔
以下,しばしば物理学,とくに力学に登場する座標概念とその関連事項を説明しよう。古典力学では運動する物体を質点とみなし,その座標x(x,y,z)が時間とともにどのように変化するかを問題にする。時間をtで表し,その関数としてx(t)がきまると,それは三次元空間の中の軌道となる。ニュートンの運動方程式, は,ある時刻における
は,ある時刻における
x,および\(\frac{dx}{dt}\)
の初期値が与えられた場合,これに対して一つの軌道が定まることを示している(mは物体の質量,Fは力)。
運動する質点を表すのに,座標系は一つときまっているわけではなく,観測者にとってつごうよく変えることができる。一つの座標系を他の座標系に変えるやり方は,一般に同一の点Pの二つの座標x(x,y,z)とx′(x′,y′,z′)との間の関係式を与えることによって定まる。必ずしも三次元に限らないのでxの成分を番号i,jなどで区別し,それらは一般に1,2,……,nの値をとるものとすると,
xi=xi(x′)(=xi(x1′,x2′,……,xn′))
(i=1,2,……,n) ……(1)
は,時間に無関係な範囲でもっとも一般的な座標変換の規則を与えるものである。簡単な例として,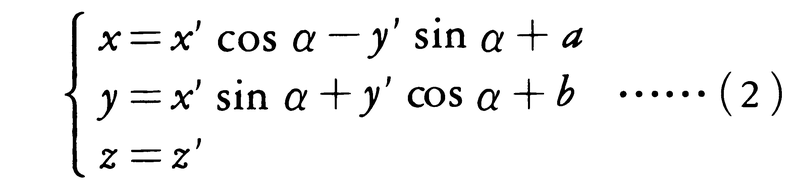
は,原点をxy平面内で点(a,b)に平行移動し,さらにその点のまわりに角度αの回転を行った直交座標系(x′,y′,z′)によってもとの(x,y,z)を表す場合である。一般に旧座標系{xi}が新座標系{xi′}の一次式の場合,すなわち(1)が具体的に,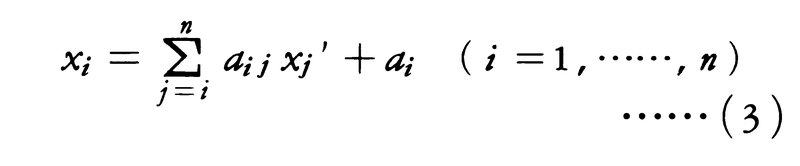
で与えられるような座標変換は一次変換と呼ばれ,行列の記法を用いてx=Ax′+aで示すことができる。ここでA=(aij)はaijを要素とするn行n列の行列,a=(ai)はn次の列ベクトル(n行1列行列)である。新座標系での記述が旧座標系の場合と同じ機能をもつためには,行列式det Aが0でないことが必要十分で,そのときx′がxの一次変換として定まり,(3)の逆変換と呼ばれる。さらに{xi′}に対し第三の座標系{xi″}があって,(3)と同様な一次変換 x′=Bx″+bになっているとすれば,{xi}→{xi″}が二つの変換を合成した一次変換x=A・Bx″+(Ab+a)で表されることになる。
このように座標変換の機能は,逆にすることと継続的に行うことの特徴を備えていて,数学上,群の性質を満たしているので座標変換群を作ると呼ばれる。一次変換(3)では,行列AはdetA≠0でありさえすればよく,これは一次変換としてもっとも一般の場合である(一次変換群)。Aが直交行列の場合,すなわちAの転置行列tAがAの逆行列に等しい(tA=AtA=1)場合の一次変換は直交変換,さらにdet A=1の場合は固有回転,det A=-1の場合は非固有回転と呼ばれる。(2)で示した実例は平面上の固有回転である。非固有回転の典型例として反転や鏡映など左手系を右手系に変える直交変換があげられ,(2)においてz=-z′と変更したものはすべてこれに属する。直交変換は直交座標系を他の直交座標系に変換するもっとも一般な一次変換であって,前述と同じ意味において群(直交変換群)を作る。
高次元空間における直交変換が物理現象の考察に役だつ例として,調和振動子系の運動の規準座標系への変換をあげることができる。すなわち,N個の三次元調和振動子が結合している場合,相互作用を表すポテンシャルが3N個の座標成分{xi}の正値二次形式, で与えられているとしよう。そのような場合は分子振動や結晶の格子振動において平衡点近傍での振動としてしばしば現れる。このとき直交座標系を{xi}から他の適当な直交座標系{ξi}に変換することにより,互いに独立な(相互作用のない)3N個の調和振動子の集団で置き換えることができる。そのような直交変換は正値対称行列Φ={Φij}を対角形にする,すなわちtTΦT=対角行列となる直交行列Tで与えられる。実際,変換後の運動方程式は,
で与えられているとしよう。そのような場合は分子振動や結晶の格子振動において平衡点近傍での振動としてしばしば現れる。このとき直交座標系を{xi}から他の適当な直交座標系{ξi}に変換することにより,互いに独立な(相互作用のない)3N個の調和振動子の集団で置き換えることができる。そのような直交変換は正値対称行列Φ={Φij}を対角形にする,すなわちtTΦT=対角行列となる直交行列Tで与えられる。実際,変換後の運動方程式は,
のように互いに独立となる。新座標系{ξi}は元の調和振動子系の規準座標系normal coordinate systemと呼ばれるもので,また各振動子ξiを元の振動子系の規準モードという。
より一般な(必ずしも一次ではない)座標変換(1)においても上に述べた群の性質が備わっている。その場合,(3)のdetAに相当するものは変換関数xi(x′)から作られるヤコビの行列式, であり,これが0でなければ逆変換xi′=xi′(x)が求められる。J(x′)は座標変数xiでの積分をxi′での積分で表すための体積要素間の関係dx1……dxn=J(x′)dx1′……dxn′にしばしば現れる。三次元極座標(または球座標)への変換(x,y,z)→(r,θ,φ)は球対称性をもつ力学系の問題を扱うのに欠くことのできない曲線座標で,J(r,θ,φ)=r2sinθである。
であり,これが0でなければ逆変換xi′=xi′(x)が求められる。J(x′)は座標変数xiでの積分をxi′での積分で表すための体積要素間の関係dx1……dxn=J(x′)dx1′……dxn′にしばしば現れる。三次元極座標(または球座標)への変換(x,y,z)→(r,θ,φ)は球対称性をもつ力学系の問題を扱うのに欠くことのできない曲線座標で,J(r,θ,φ)=r2sinθである。
同一の質点に対する二つの座標系が相対的に運動している場合,一方の座標系に対し他方は刻々と変化する座標変換を受けることになる。このとき後者を前者に対する運動座標系という。とくに平行移動する場合と回転する場合とが重要であり,後者は回転座標系と呼ばれている。
(1)平行移動 平行移動の速度をa(t)として,x=x′+a(t)で表される。元の系に対する運動がニュートンの運動方程式によって定められる(そのような系は慣性座標系と呼ばれる)としよう。すなわち,元の系の運動方程式 は,新しい系では,
は,新しい系では, となる。このように運動座標系に移ることにより元の系での運動方程式は変更される。しかし,とくに平行移動が等速直線運動の場合にはニュートンの運動方程式に変更はないので,運動座標系はまた元の系と同じ慣性系である。
となる。このように運動座標系に移ることにより元の系での運動方程式は変更される。しかし,とくに平行移動が等速直線運動の場合にはニュートンの運動方程式に変更はないので,運動座標系はまた元の系と同じ慣性系である。
(2)回転 x=R(t)x′で表され,tR(t)R(t)=R(t)tR(t)=1である。前述のとおりR(t)は直交(固有回転)行列で時間tとともに刻々と変わる。以下,三次元空間の回転座標系で慣性系の運動がどのように変更されるかをみよう。
ここで, は3行3列の行列として反対称であって,
は3行3列の行列として反対称であって, のようにR(t)に付随したベクトル
のようにR(t)に付随したベクトル とxとのベクトル積で表されることがわかる。なお,行列の反対称とは,転置行列をとると符号が変わること,すなわち,
とxとのベクトル積で表されることがわかる。なお,行列の反対称とは,転置行列をとると符号が変わること,すなわち, であることをいう。このことから前式は,
であることをいう。このことから前式は, の形で表される。これは,運動する質点の速度\(\frac{dx}{dt}\)を回転系でみたときの速度,
の形で表される。これは,運動する質点の速度\(\frac{dx}{dt}\)を回転系でみたときの速度,
 によって表す基本式で,ベクトルは回転ベクトルと呼ばれる。時間微分をもう一度繰り返すことにより,元の系におけるニュートンの運動方程式は,
によって表す基本式で,ベクトルは回転ベクトルと呼ばれる。時間微分をもう一度繰り返すことにより,元の系におけるニュートンの運動方程式は,
のようになる(ここでは時間変化しないものとした)。
すなわち回転系においては力Fに対し見かけ上の力, と-m×(×x)とが加わっていることがわかる。回転系でみたときの速度\(\frac{d′x}{dt}\)に関係する力がコリオリの力と呼ばれるものであり,また-m×(×x)は遠心力である。
と-m×(×x)とが加わっていることがわかる。回転系でみたときの速度\(\frac{d′x}{dt}\)に関係する力がコリオリの力と呼ばれるものであり,また-m×(×x)は遠心力である。
質点の運動を記述するのには,その位置を表す変数と同時に速度または運動量が独立な変数として必要であるが,これは運動方程式が時間に関する2階の常微分方程式であることに起因している。前述のような座標変換を行った場合,当然ながら運動量も変換を受けることになり,変換の形式は両方を総合的に扱うことによりもっとも一般的となる。解析力学では,自由度fの力学系を扱うのにf個の正準座標q1,q2,……,qfと,それに対し共役な正準運動量p1,p2,……,pfの2f変数によって運動が完全に定められ,他の別な正準変数の組への変換は正準変換によって行われる。2f個の正準変数のうちの初めのf個q1,q2,……,qfのことをこの力学系の一般化座標という。例えば(1)で示される座標変換の場合,直交座標で表された元の変数xが新しい座標x′によって表されているわけであるが,この変数x′を力学系の一般化座標qi=xi′(i=1,2,……,n=f)とみなすことができる。このとき{qi}に対する正準運動量{pi}と,元の座標系における運動量,
との間に成り立つ変換は次のようになる。まずf個の関係式xi=xi(q1……qf)のおのおのについて次のような全微分式,
が成り立つが,{pi}と{pi°}との関係はこれと相対的に,
で与えられる。座標と運動量とをいっしょにした2f個の正準変数(x1,……,xf;p1°,……,pf°)から(q1,……,qf;p1,……,pf)への変換は正準変換の一例である。一般化座標q1,……,qfは曲線座標系上の点であるが,これと運動量とをいっしょにした正準変数の2f次元相空間は直交座標系とみなされる。そして(4)から導かれる座標空間の体積要素間の関係dx1……dxf=J(q)dq1……dqfと,(5)から導かれる運動量空間の体積要素間の関係dp1……dpf=J(q)dp1°……dpf°とをいっしょにして,相空間における体積不変性dx1……dxfdp1°……dpf°=dq1……dqfdp1……dpfが導かれることになる。
→解析力学
執筆者:長谷川 洋
出典 株式会社平凡社「改訂新版 世界大百科事典」改訂新版 世界大百科事典について 情報
Sponsored by ![]()
出典 株式会社平凡社百科事典マイペディアについて 情報
Sponsored by ![]()
出典 ブリタニカ国際大百科事典 小項目事典ブリタニカ国際大百科事典 小項目事典について 情報
Sponsored by ![]()
夏の暑さに体が慣れること。数日から数十日間で起こる短期暑熱順化と、数年または数世代にかけて起こる長期暑熱順化とがある。→寒冷順化[補説]近年では、冷房設備の普及にともない短期暑熱順化が起こりにくくなっ...