デジタル大辞泉 「レーダー」の意味・読み・例文・類語
レーダー(radar)
レーダー【RAD-AR】[Risk/Benefit Assessment of Drugs-Analysis and Response]
Sponsored by ![]()
翻訳|radar
Sponsored by ![]()
出典 精選版 日本国語大辞典精選版 日本国語大辞典について 情報 | 凡例
Sponsored by ![]()
radio detection and rangingの略語で,電波の反射を利用して目標を検出し,その位置を測定するための装置およびその技術をいう。電波を船舶,航空機などの目標物体に向けて放射し,目標によって反射される電波,あるいは目標によって再放射される電波を受け,電波の往復時間や電波の戻ってくる方向から目標の位置を測定するものである。
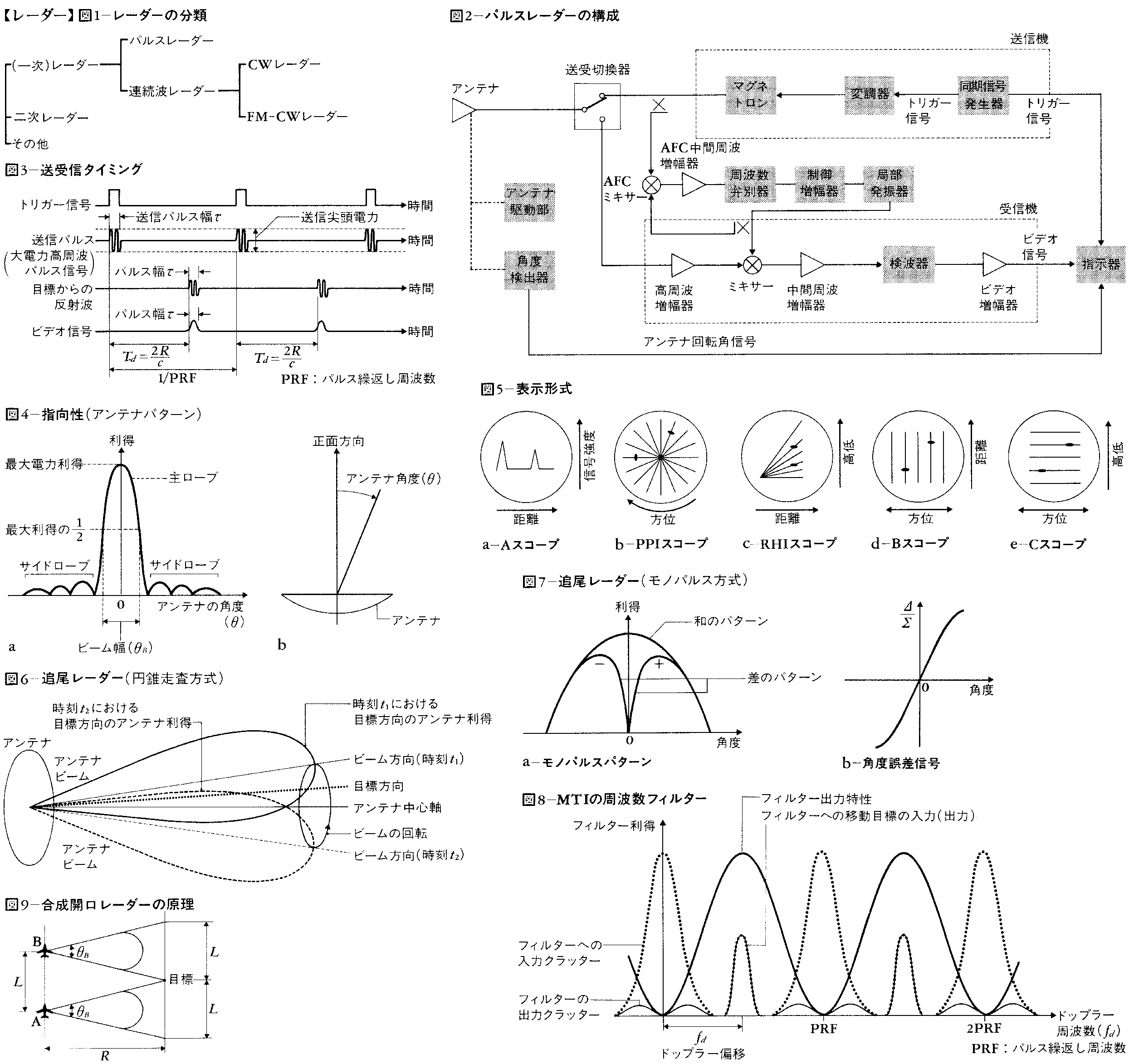
レーダーは肉眼に比べ単に遠くから目標を探知できるというだけでなく,(1)夜間においても,また煙,霧,雲,雨を通しても目標を発見でき,(2)電波の往復時間を測定することで,目標の距離を正確に知ることができるなどの特徴をもつ。レーダーは送受信信号の形状によって図1のように分類される。レーダーには一次レーダーと二次レーダーがある。前者は送信した電波が目標によって反射され戻ってくる電波を利用するレーダーであり,後者はたとえば敵味方識別装置などのように目標が再放射する電波を利用するレーダーである。また,その他のレーダーとして受信だけを行うパッシブレーダー,送信装置と受信装置を離れた場所に設置するバイスタティックレーダーなどがある。
一次レーダーはさらにパルスレーダーと連続波レーダーに分類される。パルスレーダーとはレーダーの送受信波形として方形状のパルス変調波を用いるものをいう。一方,パルス変調されない正弦波を送受信するレーダーを連続波continuous wave(CW)レーダーと呼ぶ。無変調の正弦波を用いるCWレーダーでは距離の測定ができない。CWレーダーに測距能力をもたせるためには,送信信号に周波数変調(FM。frequency modulationの略)を施すことが必要で,この方式を周波数変調連続波(FM-CW)レーダーといい,低高度用の電波高度計など,限られた分野で用いられている。
また,広義には赤外線,レーザー光線などの光波(レーザーレーダーなど)およびソナーなど音波を用いるものもレーダーに含めるが,単にレーダーというと電波を用いた一次レーダーを指す。本項では以下でおもに狭義のレーダーについて述べる。
レーダーのハードウェアは通常,アンテナ,送信機,受信機および指示器で構成されるが,種々の信号処理を伴うものには信号処理器が付加される。
1886年ドイツのH.ヘルツは電波の存在を検証し,電波が直進し物体により反射されるなど光と同様な性質をもつことを見いだした。1904年ドイツのフルスマイヤーC.Hulsmeyerが電波を利用した航法システムに関する特許を取得した。さらに,22年イタリアのG.マルコーニが電波により海上の物体を検知する装置の可能性を提唱した。25年アメリカのブライトG.BreitとチューブM.A.Tuveは電離層に向けパルス状の電波を発射,その反射波から電離層の高さを観測した。これが今日のパルスレーダー技術の基礎になった。30年代からはアメリカ,イギリス,ドイツ,フランスでレーダーの開発が盛んに行われ,第2次世界大戦とともに研究は加速的に進んだ。たとえばイギリスは34年よりR.A.ワトソンワットの指導のもとにレーダーの開発に着手,38年にはイギリス南部に敵の航空機の接近を警戒するレーダーを配備した。初期のレーダーはアンテナなどが大型であり,地上あるいは大型艦艇にしか配備できなかったが,第2次大戦中ごろより小型化され,航空機にも搭載されるようになる。また測定精度も向上し,爆撃や砲撃の照準用レーダーが43年に出現している。さらに艦載レーダーに発見されないように超低空飛行で機動部隊に接近してくる敵の航空機を探知する航空機用早期警戒レーダーも開発された。このように,第2次大戦中にレーダーの実用化は大きく進み,その優劣の差が戦闘の勝敗に大きく寄与した。
第2次大戦後は,レーダーの平和利用が盛んに行われるようになり,航空機や船舶の航行用レーダー,航空管制レーダーや気象観測レーダーなどが開発された。また,宇宙開発やリモートセンシングの分野などにおいても欠くことのできない装置となっている。
一方,レーダー技術の面では,1950年代に入って後述するSAR(synthetic aperture radarの略),MTI(moving target indicatorの略)などのコヒーレントレーダーといわれる反射波の振幅および位相情報を検出利用する技術が実用化された。60年代には,信号のディジタル処理技術が開発され,また,電離層による短波帯の電波の反射を利用したOTH(over the horizonの略)レーダーが実用化された。70年代に入って,それまで,ひとかたまりのものとして扱ってきたレーダーの受信信号の内部に含まれる種々の情報を抽出しようとする試みがなされるようになり,この技術分野の進歩によってリモートセンシングおよび軍事偵察へのレーダーの利用範囲がさらに広がった。
一次レーダーのなかでもっとも代表的なパルスレーダーを例にとり説明する(図2,3)。
(1)送信回路 同期信号発生器が出力するトリガー信号に同期してマグネトロンを駆動する。マグネトロンは変調器によって決まる一定のパルス幅および一定のパルス繰返し周波数(PRF。pulse repetition frequencyの略)の大電力高周波パルス(送信パルス)を発生する。
(2)アンテナ パルスレーダーでは,通常1個のアンテナで送信,受信を行うため,送受切換器が必要となる。送信パルスはこの送受切換器を介してアンテナより外部空間へ放射される。アンテナの性能は,指向性,電力利得,ビーム幅,サイドローブレベルなどで表される。指向性とはアンテナから放射されるエネルギーの空間分布を示すもので,図4のように角度の関数として表示される。電力利得はアンテナがエネルギーを集中させる能力を示す量で,次式で定義される。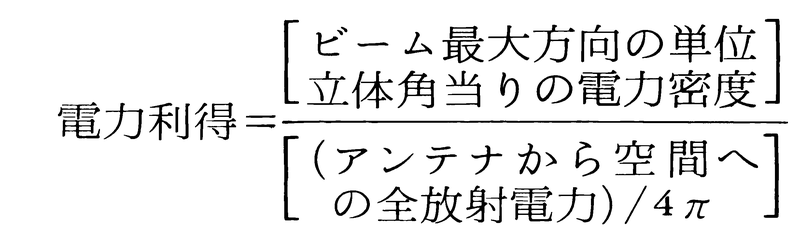
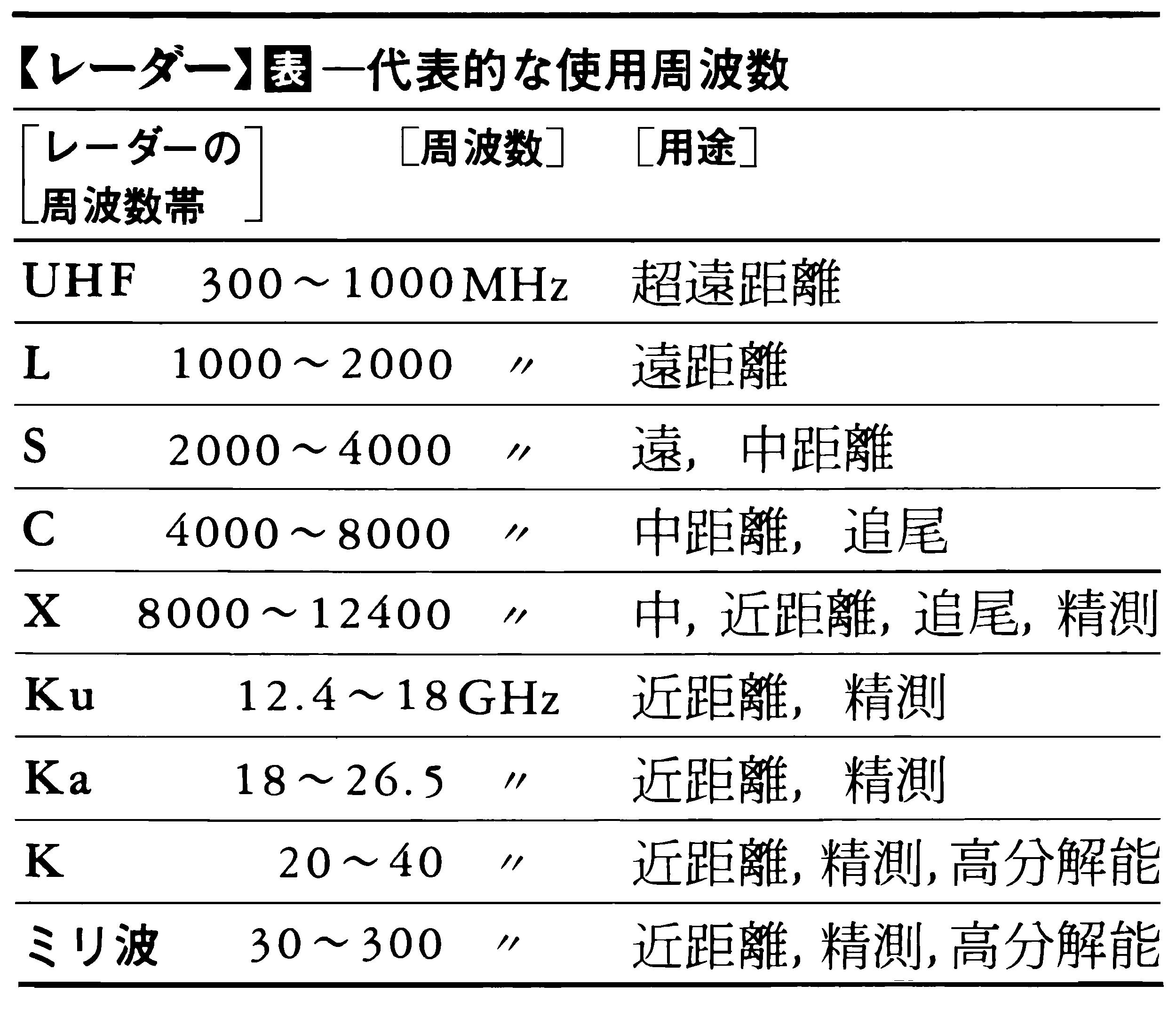
図4において,電力利得が,その最大値から半分の大きさになる角度幅をビーム幅(電力半値幅)と呼び,アンテナからの放射エネルギーの集中する角度範囲を表す。アンテナ主ローブとは図に示す範囲をいい,放射電力の大部分(通常90%以上)が集中している。残りの範囲をサイドローブといい,この放射電力強度をサイドローブレベルという。サイドローブはアンテナの使用目的からは不要なものであり,目標をとらえるうえで誤差を生ずる原因になるため,できる限り小さくする必要がある。レーダーの使用周波数は数MHzから数十GHz以上にわたるが,尖鋭なビームが得られやすいこと,装置の小型化がはかられやすいことから,1GHz以上のマイクロ波が多く使用される。代表的な使用周波数とその用途を表に示す。
(3)受信回路・指示器 アンテナで受信した目標からの反射波は,送受切換器を経由して受信機に入力され,増幅されたのち,ミキサーに入り局部発振器の出力と混合され,中間周波数信号に変換される。この信号は,さらに増幅,検波されてビデオvideo信号になり指示器へ送出される。また指示器には,ビデオ信号をアンテナの回転に同期させて表示するため,アンテナ回転角信号が角度検出器より入力される。送信周波数が変動すると,受信機が離調して受信感度が低下する。そこで,このようなことがないように,局部発振器の周波数がつねに送信周波数と正確に中間周波数分だけ離れた周波数になるように,自動周波数制御(AFC。automatic frequency controlの略)を行う。局部発振器は電圧制御発振器で,周波数弁別器出力で駆動される制御増幅器により発振周波数が制御され,AFCミキサー,AFC中間周波増幅器を含むサーボループを形成している。
パルスレーダーでは,大電力の高周波パルス(送信パルス)を放射してから反射波を受信するまでの時間Tdによって目標までの距離を測定する(図3)。送信パルスが目標まで到達するのに要した時間はTd/2であるから,目標とレーダーの距離Rは次式で表される。
R=\(\frac{cTd}{2}\) ……(1)
ここで,cは電波の速度(約3×108m/s)である。
目標の方位を測定するためには目標からの反射波がどの方向から到来したかを識別する必要がある。図4に示すように,アンテナは尖鋭な指向性をもち,アンテナの正面方向で利得が最大になる。したがって,アンテナ全体を水平方向に回転させれば,目標からの受信信号が最大になるアンテナ回転角方向が目標方位を示す。
目標の距離と方向を表示する装置を指示器といい,通常CRT(cathoderay tubeの略)が用いられる。表示形式には種々のタイプがあり,そのレーダーが用いられる目的に応じて選択される。表示タイプを大別すると,目標からの反射ビデオ信号の強度を一つの軸を用いて示すものと,輝度で表すものとがある。前者の表示形式に図5-aに示すAスコープがあり,CRTの横軸に距離を,縦軸に反射波の強度を表示する。一方,反射の強度を輝度として表すものの中で,もっとも一般的な表示形式として図5-bに示すPPI(plan position indicatorの略)スコープがある。この表示形式はCRTの中心をレーダーの設置位置とみなし,中心点からCRTの外周部に向けて放射状の掃引を行う。掃引方向をアンテナの回転角(方位)に同期させビデオ信号をCRT上に輝度表示する。掃引の開始はレーダーの送信パルスの放射と同時に行い,CRTの中心から外周部までの距離をR0と想定した場合,時間2R0/c秒後に外周部に達するように掃引速度を決める。図5-cに示すRHI(range height indicatorの略)スコープは特定の方位に対し,高低走査を行うレーダーに適した表示形式である。そのほか,比較的よく用いられるBスコープとCスコープをそれぞれ図5-d,eに示す。
一般にレーダーの基本的性能は最大探知距離,距離分解能,角度分解能で表される。
距離Rに存在する目標からの反射波受信電力Prは,
で表される。ここで,Ptは送信尖頭電力(送信機が発生する高周波パルス信号の尖頭(ピーク)電力),Gはアンテナの利得,λは送信波長,σはレーダーの方向から見た目標の有効反射面積でレーダー断面積と呼ばれる。
最大探知距離はレーダーの受信感度によって決まる。受信感度は,受信機の内部で発生する受信機雑音と深い関連があり,雑音中から目標を弁別し得る,最小の反射波受信電力(MDS。minimum detectable signalの略)で表される。通常のパルスレーダーの場合,MDSは受信機雑音より数倍程度大きいことが必要である。MDSは,簡単化のため,Smin(最小受信信号)と呼ばれることが多い。(2)式で与えられる受信電力Prが,Sminと等しくなる距離が最大探知距離Rmaxであり,次式で表される。
(3)式はレーダー距離方程式と呼ばれる。この式から最大探知距離を2倍にするためには,たとえば,送信尖頭電力を16倍にしなければならないことがわかる。
同一方向に近接して存在する2目標間の距離を徐々に近づけたとき,レーダーがそれらを2目標であると判別し得る最小の距離間隔をレーダーの距離分解能という。距離分解能⊿Rは送信パルス幅τで決まり,
⊿R=\(\frac{cτ}{2}\) ……(4)
で表される。送信パルス幅が1μsのレーダーの距離分解能は150mである。これは2目標間の距離が送信パルス幅に相当する距離以下になると,2目標からの反射波が時間的に重なり合って相互に区別できなくなるためである。
同一距離に存在する2目標を徐々に近づけたとき,レーダーがそれらを2目標であると判別し得る最小の角度差をレーダーの角度分解能という。角度分解能⊿θはアンテナのビーム幅θbで決まり,ほぼ,
⊿θ=θb ……(5)
で表される。ところで,θbと一般に使用される円形開口アンテナの直径Dとの関係は次式で表される。
θb≅70\(\frac{λ}{D}\)(度) ……(6)
したがって,送信波長λが3cmのとき,アンテナ径Dが70cmの円形開口アンテナを用いたレーダーの角度分解能は3度となる。
以下におもな応用分野とそこで使用されるレーダーを示す。
気象レーダーは,大気中の雨雲,降雨帯の分布や移動状況あるいは降水量などの気象情報を得るために用いられるレーダーである。気象レーダーの使用周波数には9375MHz(波長3.2cm),5300MHz(波長5.7cm)および2800MHz(波長10cm)があり,地上設置および船舶搭載用の気象観測レーダーには,5.7cm波が用いられる。10cm波は降雨による伝搬路の減衰が少ないことから,遠距離台風観測用に用いられる。航空機に搭載し安全航行のために気象条件の予知および地形の観測を行う航法気象レーダーには,3.2cm波または5.7cm波が用いられる。
航空管制レーダーは航空交通の安全確保と空域の有効活用のために用いられるレーダーの総称であり,(1)航空路にある航空機までの距離と方位を測定する航路監視レーダー(ARSR。air route surveillance radarの略),(2)空港周辺の一定区域のターミナル管制に使用される空港監視レーダー(ASR。airport surveillance radarの略),(3)着陸進入誘導に使用される精測進入レーダー(PAR。precision approach radarの略),(4)空港地表面交通の頻繁化に対処するため空港面を専門に捜索する空港面探知装置(ASDE。airport surface detection equipmentの略)などがある。
船舶用レーダーは衝突防止および自船位置の測定のために他船,島,陸岸,航路標識などの目標を高精度,高分解能で検出するレーダーである。実用されている船舶用レーダーの周波数帯はミリ波,3cm波,5cm波,10cm波である。ミリ波は高分解能を必要とする狭水路を航行する船舶のレーダーに使用される。3cm波は比較的小型のアンテナで鋭い指向性が得られるためもっとも多く使用されている。10cm波はアンテナが大型になるが,目標探知長距離性能に優れ,大型船舶用のレーダーに使用される。
港湾レーダーは主要な港湾や海峡に設置し,船舶の航行を管制するために用いられるレーダーである。港湾レーダーは,高分解能が必要であるため周波数帯は1.2cm波ないし8mm波であり,パルス幅は0.1μs以下のものを用いることが多い。
対空警戒用レーダーは敵の航空機の接近を警戒するために用いられるレーダーであり,捜索レーダーと測高レーダーで構成される。捜索レーダーで目標の方位と距離はわかるが,高度が不明であるため,尖鋭なアンテナビームを上下方向に走査し,目標の高低角を測る測高レーダーを併用する。なお,近年,1台のレーダーで目標の空間座標を決定できる三次元レーダーが実用化されている。三次元レーダーには種々の方式があるが,垂直面内に多数のビームを出し,これを水平面内で走査する方式が多く使用されている。また,地上あるいは艦船に設置された対空警戒レーダーによる被探知を避けるため超低空飛行で接近する敵の航空機を探知する機上早期警戒レーダー(AEW radar。airborne early warning radarの略)がある。さらに,短波帯の電波が電離層によって反射されることを利用し,地上のレーダーで,水平線の向こう側の飛翔(ひしよう)体を発見する見通し外レーダー(OTH radar)がある。
レーダーで目標の現在位置とその運動を測定し,計算機を使って目標の未来位置を予測して武器の射撃方向の制御を行うものを火器管制装置(FCS。fire control systemの略)という。現在運用されている戦闘機や艦艇にはほとんどすべてこの種の装置が搭載されている。
人工衛星や航空機に搭載して資源探査や海洋観測のために用いられるレーダーである。代表的なリモートセンシング用レーダーには,海面や地面の状況を測定するマイクロ波散乱計および地表面の高分解能画像を得る合成開口レーダー(後述)がある。
その他のレーダーとして,(1)航空機の高度を測定する電波高度計(高度計),(2)航空機の対地速度などを連続的に測定するドップラーナビゲーター,(3)航空機に搭載し山岳などとの衝突を回避するために用いられる地形回避レーダーterrain avoidance radar,(4)地形に沿って飛行するために使用される地形追随レーダーterrain following radar,(5)セミアクティブミサイルの誘導のためにつねに特定の目標をイルミネートする照射用レーダーなどがあり,その応用範囲は多岐にわたる。
アンテナビームをつねに目標方向に指向させて目標を自動的に追跡し,目標の方位角,高低角,距離および速度を連続的に計測するレーダーを追尾レーダーという。アンテナビームを目標方向に向けるためには,目標の真の方向とアンテナの方向との角度差に対応する角度誤差信号を検出し,この角度誤差信号が0になるようにアンテナ全体をサーボ系によって駆動する。追尾レーダーは,角度誤差信号の検出方式によって円錐走査conical scan方式とモノパルスmonopulse方式などに分類される。円錐走査方式は図6に示すようにアンテナ中心軸のまわりに,ビームをやや傾けて回転させるもので,目標方向と中心軸が一致していないと目標方向のアンテナ利得はビームの回転につれて変化し,ビームが目標にもっとも近づいたとき最大になる。したがって,目標からの受信信号の振幅の変化と位相はそれぞれ目標と中心軸のずれ角と目標の方向に対応して検出される。一方,モノパルス方式は図7-aに示すような和と差のパターンを有するモノパルスアンテナを使用し,差のパターンで受信した信号⊿を和のパターンで受信した信号Σで割ると図7-bに示すような角度誤差信号が得られる。方位角あるいは高低角のどちらか一方の角度誤差が得られるものを1軸モノパルスといい,方位角と高低角の両者の角度誤差が同時に得られるものを2軸モノパルスと呼ぶ。円錐走査方式では方位角と高低角の角度誤差を検出するためには少なくともおのおの2個以上の受信パルスを検出する必要があるが,モノパルス方式では単一の受信パルスで角度誤差の検出が可能である。また,円錐走査方式では受信信号の振幅変化により角度誤差を検出しているため,目標の運動などによる振幅変動があると追尾誤差を生ずることがある。一方,モノパルス方式では単一の受信パルスごとに瞬時に角度誤差検出が行われるため,受信パルスの振幅変動による誤差は生じない。
レーダー距離方程式を変形すると次のようになる。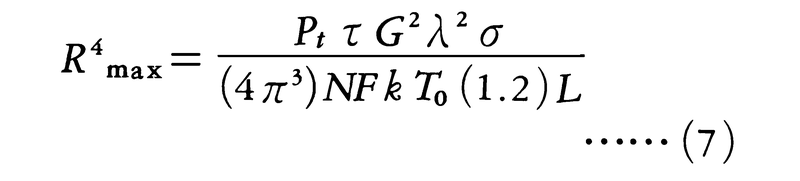
ここで,NFは受信機の雑音指数,kはボルツマン定数,T0は絶対温度,τは送信パルス幅,Lはシステム損失である。(7)式より送信エネルギー(Pt×τ)が大きいほど探知距離は増大する。しかしながら,送信管などの実現性に対して制約があり,送信尖頭電力Ptはある程度以上大きくできない。また,パルス幅τを長くして探知距離を増大させる方法が考えられるが,パルス幅を長くするとcτ/2で与えられるレーダーの距離分解能が劣化する。この相反する探知距離と距離分解能の両者を満足するものとして考案されたのがパルス圧縮レーダーpulse compression radarで,送信時には長いパルス幅で送信し,受信時に所望の距離分解能に対応するパルス幅に圧縮する。パルス圧縮レーダーには直線状周波数変調方式(linear FM方式あるいはchirp方式)と符号変調方式(coded方式)の二つの代表的な方式がある。直線状周波数変調方式では,送信時に送信パルス信号に直線的な周波数変調を施し,受信時に周波数変調信号に整合したフィルターを通すことによって受信パルスの圧縮を行う。送信パルス幅内の周波数偏移量を⊿f(Hz)とすると,この方式の距離分解能はほぼc/(2⊿f)になる。符号変調方式では,送信時に送信パルスを時間的にN等分し,そのおのおのに対し1と0からなるある符号系列に対応して0およびπの位相変調を施し,受信時にこの変調符号系列に整合したフィルターを通すことによってパルス圧縮を行う。この符号系列の代表的なものにバーカー符号barker codeがあり,そのビット長をNとすると,圧縮パルス幅は送信パルス幅の1/Nになる。
地面,海面あるいは建造物などの固定目標からの反射信号(クラッター)はきわめて強いため,航空機などの移動目標からの反射信号は,その中に埋もれてしまい,検出することが困難なことが多い。そこで,ドップラー効果を利用して移動目標からの反射信号だけを取り出す装置,MTIが考案された。移動目標からの反射波の周波数は,送信周波数に対し,(8)式で表される量(ドップラー周波数)だけ偏移している。
ここで,vはレーダーと目標の相対速度,f0は送信周波数である。一方,固定目標からの反射信号(クラッター)は周波数偏移を受けない(fd=0)。したがって,図8に示すような特性の周波数フィルターを用いてクラッターを除去し,移動目標だけを抽出することができる。ところで,艦船あるいは航空機に搭載されるMTIでは,レーダーそのものがある速度で移動しているため,固定目標との間に相対速度が生じ,クラッター自体がドップラー周波数偏移を受ける。このような場合には,クラッターのドップラー周波数を検出し,それが0になるように周波数変換を行うクラッタートラッカーが別途必要になる。
クラッターを抑圧し移動目標を検出する機能はMTIと同一であるが,さらに目標のドップラー速度を特定し得る機能を備えたパルスレーダーをパルスドップラーレーダーと呼ぶ。パルスドップラーレーダーは,高PRF(high PRF),中PRF(medium PRF)および低PRF(low PRF)方式に分類される。高PRF方式は,最初のパルスを送信してから目標に反射して帰ってくる時間の前に,次のパルスを送信してしまうために距離の測定にあいまいさが残るが,目標速度は確定できる方式であり,対向接近目標を長距離で探知するのに適する。中PRF方式は,距離および速度の測定ともにあいまいさがある方式であり,接近する目標と遠ざかる目標の両者を探知しなければならない場合に適する。距離のあいまいさを解決するためには,送信に複数のPRFを切り換え使用し,得られた複数の測定データから目標の真の距離を算出するマルチPRFレンジングの手法が用いられる。低PRF方式は距離のあいまいさがない方式であり,地上の移動目標を検出する場合などに用いられる。
レーダーの方位分解能を向上させるためにはアンテナのビーム幅を狭くする必要がある。したがって,通常のアンテナを用いてきわめて高い分解能を得ようとすると非常に大きなアンテナが必要になる。合成開口レーダー(SAR)は比較的小さな実開口アンテナを用い,受信した信号に特殊な信号処理を施すことにより,等価的にきわめて大きなアンテナと同等な方位分解能を得ることができる映像レーダーimaging radarである。図9に示すようにSARを搭載した航空機が位置Aから位置Bまで移動する間,目標は実開口アンテナで照射され続け,この間に受信されるすべての信号を用いて信号処理が実施される。その結果開口長を実効的にLの大きさに合成したアレーアンテナを用いたのと等価な効果が得られる。SARの場合電波は往復するため,長さLの合成開口アンテナのビーム幅θaは,使用されるレーダーの波長がλのとき,
θa≅\(\frac{λ}{2L}\) …(9)
となる。また,合成開口長Lは,
L≅θbR ……(10)
で表される。ここでθbは実開口アンテナのビーム幅で,その開口長をlとすると,
θb \(\frac{λ}{l}\) ……(11)
\(\frac{λ}{l}\) ……(11)
で表される。これらの関係を用いると,SARの航空機進行方向の距離分解能δは次のようになる。
δ=θaR≅\(\frac{l}{2}\) ……(12)
すなわち,SARの距離分解能は距離に関係なく一定で,実開口長lが小さいほど分解能がよくなるという,一見,常識とは逆の性質をもつ。これはアンテナが小さいほどビーム幅が広くなり目標を照射し反射波を受信する時間が長くなるためである。ただし,進行方向と直角な方向の距離分解能は,通常のレーダーと同様にパルス幅で決まり,
⊿R=\(\frac{cτ}{2}\)
である。
開口部に多数の素子アンテナを配列し,各素子アンテナから放射される電波の位相を個別に制御し,全体として合成されるビームの指向方向を電子的に任意に制御するレーダーをフェーズドアレイレーダーと呼ぶ。フェーズドアレイレーダーの特徴は,(1)機械的な慣性がないのでビームの指向方向を高速に変更できる,(2)レーダーの機能に適したアンテナパターンが任意に合成できる,(3)多数の素子アンテナが並列に動作するため冗長度が大きく,また機械的な可動部分がないため信頼性が向上することなどがあげられる。
執筆者:鹿島 孝
出典 株式会社平凡社「改訂新版 世界大百科事典」改訂新版 世界大百科事典について 情報
Sponsored by ![]()
電磁波を放射し、目標物体表面から反射される電磁波のエコーを受信して目標物を検知する装置をいう。目標物の存在は、エコーの検出、または目標物内のトランスポンダー(レーダー応答機)からの応答信号を受信するまでの時間と方向により明らかになる。レーダーの呼称は、無線波の検出と測距の意味のradio detection and rangingの縮小語としてアメリカ海軍の関係者が第二次世界大戦中に使い始め、戦後に世界的に統一された。
目標物の情報としては、電磁波の放射と受信間の時間から距離が得られ、アンテナの旋回・回転による電磁波の最大受信角度から方向が、エコーの性質から対象物の形状や属性が得られる。レーダーでは送信機を停止して、目標物それ自体が発する電磁波、または外部からの電磁波の照射による反射波を検出するパッシブ型の動作も行う。
[岩田倫典]
電磁波を用いて物体を検出しようというアイデアは、1889年にクロアチア生まれのセルビア系アメリカ人テスラが提案した。1904年にはドイツのハルスマイヤーChristian Hulsmeyerが電磁波を用いた船の衝突防止装置の特許を得ている。
イギリスでは、1922年に無線電信の父マルコーニが短波の普及の一環として、短波を船の衝突防止に役だてるべきだと提案し、アメリカでは海軍研究所のテーラーA. H. TaylorとヤングL. C. Youngがポトマック川を挟んで短波の実験中に、船によって電波が妨害されることを認めた。1931年にテーラーのグループは60メガヘルツ波のFMドップラーレーダーで65キロメートル先の飛行機を探知している。
ワシントンのカーネギー大学のG・ブライトとチューブMerie Antony Tuve(1901―1982)は、電離層の観測のために0.5ミリ秒のパルスを打ち上げ、13キロメートル離れた受信機で受信した。これがパルスレーダーの始まりである。アメリカではヤングの示唆によって開発が進められ、1936年には28メガヘルツ、1937年には200メガヘルツのパルスレーダーが開発された。
当時、イギリスではレーダーをラジオロケーターとよんだが、ドイツ空軍機の対策として1934年にパルスレーダーの開発が開始された。物理研究所のワトソン・ワットは1935年には23キロメートル先、1936年には70メートルの大型アンテナにより120キロメートル先(高度450メートル)の飛行機をとらえることに成功した。ついで、1939年にはドイツ空軍機の撃墜に威力を発揮した200メガヘルツ(1.5メートル波)のチェーン・ホーム・ロー(CHL)・レーダーを開発している。
レーダーが今日の形に完成されたのは、第二次世界大戦開始翌年の1940年にアメリカが、イギリスへの軍事援助の目的でマサチューセッツ工科大学内に放射研究所を設立し、本格的なレーダーの開発を行ったことによる。ここには、イギリスから「電磁波を短くするとよい」という経験と、ストラッピング多空胴マグネトロン(磁電管)の技術が導入された。研究所は、レーダーに不可欠なマイクロ波電子管、目標物があたかも地図上を移動するように表示するPPI(Plane Position Indicator)表示装置のほか、ロラン、デッカなどの電波航法装置、GCA、ILSなどの着陸支援の電波装置を開発した。この研究所は終戦とともに解散した。
フランスでは船舶の障害探知機としてメートル波、デシメートル波を利用する装置を開発し、1935年には20センチメートル波で船なら10キロメートル先、海岸線なら20キロメートル先を探知している。ドイツではレーダーをウルツブルクとよび、1935年には10センチメートル波を利用して霧の中でも飛行機を探知できるミステリーシステムを開発したが、攻撃向きでないとして開発を中断した。開発再開時にはマグネトロンはなく、他国に遅れたものしかできなかった。
日本ではレーダーを電波探知機、略して電探とよび、1939年(昭和14)には陸軍がメートル波のFM式レーダーを開発した。1941年には陸軍がメートル波によるパルスレーダーで250キロメートル先の飛行機を探知し、海軍は10センチメートル波の水上警戒用レーダーの実験に成功して、イギリスに匹敵するマグネトロンを開発している。生産が本格化したのは、1942年シンガポールとコレヒドールで米英軍のレーダーを捕獲したことと、ミッドウェー海戦の敗北への反省からで、全艦艇に電探を搭載するなど陸海軍とも実戦配備が進み、第二次世界大戦終戦までに10センチメートル波など30種のレーダーが開発され使用された。
第二次世界大戦後は、民間用レーダーとしてもっぱら船舶用のものが生産され、航空機用や観察用にも用途を広げている。
[岩田倫典]
レーダーは航空機、ロケット、船舶、空港、港湾、大気状態などの識別、航行支援、監視、観察、測定などに広く用いられる。初期には100メガヘルツ~10ギガヘルツ、つまり波長3メートル~3センチメートルの電磁波が用いられた。しかし、電磁波の周波数が高いほどアンテナの効率は高く、分解能はよくなるが、周波数が大きくなると到達距離が短くなることから、実用的な3ギガヘルツ~10ギガヘルツのレーダーが主流となっている。現在では、とくに近距離の空港監視などに4ミリメートル波のものも使用されている。さらに短い電磁波であるレーザー光も、距離測定、大気汚染観察、ミサイルの追跡などに使用されている。
レーダーは、一次レーダーと二次レーダーに大別される。一次レーダーは、パルス状または連続した電磁波を目標に照射して、目標物から反射による微弱な信号を検出するものである。このほか、パッシブ型専用のパッシブレーダーや、送信側と受信側を地理的に分離したバイスタティックレーダーがある。
一次レーダーにはパルスレーダーと連続波(CW)レーダーがあり、前者が広く用いられる。パルスレーダーは、電磁波を方形(ほうけい)パルスで変調したものを目標物に当て、その微弱なエコーを検出するものである。パルスの往復時間で距離を、戻りパルスの大きさと変化で形状・速度を識別・測定して表示する。パルスレーダーで、距離分解能を改善するために送信パルス幅内で周波数変調や位相変調を加え、占有周波数帯域を広げたものをパルス圧縮レーダーとよぶ。
連続波レーダーは、目標物の移動に伴う電磁波のドップラー効果を検出してその移動速度を観測するのに用いるもので、ドップラーレーダーともいう。この際、ドップラー周波数を可聴周波数とすると、人間や車両の動きを臨場感のある音として聞くことができる。また純粋な正弦波だけでは測距能力がないので、繰り返し周波数変調を加えて信号の情報量を増し、距離も測れるようにしたものを周波数変調連続波レーダー(FM-CWレーダー)とよぶ。周波数変調の周波数を低く、帯域を広げて距離の刻みを小さくすると、パルスレーダーでは不可能な超近距離の測定や、高精度で距離を測る電波高度計に使用できる。
二次レーダーは、レーダーからの送信信号を目標物にあるトランスポンダーが受け、その信号によりトランスポンダー内の送信機を駆動して別の波長の信号を元のレーダーに送り戻すものである。これによると、目標を識別することが容易で到達距離を伸ばすことができるので、測距装置などに利用されている。
レーダーの使用目的は、探索用と追跡用に大別できる。探索用は幅の広い電磁波のビームが、追跡用には細いビームが用いられ、情報処理にはコンピュータを連動させている。
[岩田倫典]
レーダーの基本となる性能である方位分解能は、使用電磁波の周波数をアンテナ直径(メートル)で割ったものを70倍したものであり、距離分解能はマイクロ秒で表したパルス幅の150倍である。最大到達距離は、送信電力の4乗根、使用周波数の平方根、アンテナ径の積に比例する。
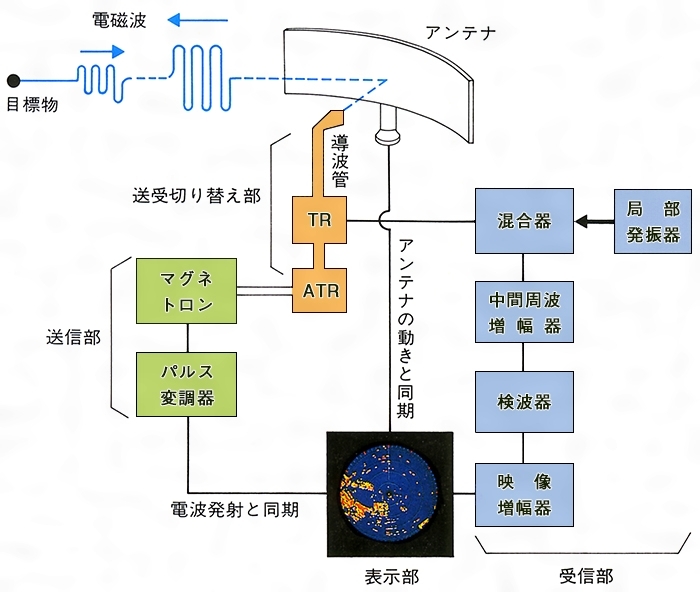
パルスレーダーは、送信部、アンテナ、送受切り替え部、受信部、表示部からできている。送信部は、1キロワットから数メガワットの大出力マグネトロンやクライストロンを、小型では半導体(GaAs)発振器を変調し、数マイクロ秒から数十分の1マイクロ秒幅のパルスを毎秒数百から数千回繰り返し発生させる。発生したパルスは、導波管内に設けられた送受切り替え器を駆動しながらアンテナに達する。送受切り替え器はATR(anti-transmit receive tube)とTR(transmit receive tube)のガス放電管で、送信パルスで点灯されることにより、パルスが受信部に入ることを妨げる。
アンテナはパラボラ型のアンテナが一般的である。たとえば船舶用には、船の動揺を考慮して、電磁ビームが垂直を広く、水平を狭くとれるように放物円筒反射鏡を用いており、旋回・回転などの扇状走査を行う。特殊な用途には機械的な旋回・回転の不要なフェーズドアレイアンテナも用いられる。
アンテナから放射された電波は目標物に当たり、ふたたびアンテナを経て送信パルスが通ったのと同じ導波管を逆に通る。この際、受信パルスの電圧は小さいので、TR管とATR管は点灯せず、両者の装着されている導波管の形状により送信部に受信パルスが入るのが妨げられる。導波管を通った受信パルスは受信機に入り、局部発振器の信号と混合され、中間周波数の信号となる。ついで、中間周波増幅器、検波器、映像増幅器を経て、ブラウン管の輝度信号を変化させる。ブラウン管での表示方式は多いが、PPI方式では、扇を開くように放射状の電子ビームをアンテナの動きと同期して次々とつくり、その上に信号をのせて地図状の表示を得るものである。このほか、時間軸と信号、方位角と距離というように直交座標で表示するものなどがある。
[岩田倫典]
船舶には目的に応じてミリメートル波(ミリ波)、3センチメートル波、5センチメートル波、10センチメートル波のレーダーが設置され、港湾では港湾レーダーが船舶の運行の安全を図っている。
空港には、空港監視レーダー(ASR)、精測進入レーダー(PAR)、側方監視レーダー(SLAR)、空港面探知レーダー(ASDE)、二次監視レーダー(SSR、DABS)、航空路監視レーダー(ARSR)や三次元レーダーが相互に関連して設置され、航空機の離着陸の安全を図っている。また、航空機や人工衛星に搭載された小型アンテナの移動を利用して大型アンテナのような性格をもち地形図を作成する合成開口レーダー、山などとの衝突を避ける地形追従レーダーや、水平線を越えて監視するOTHレーダーがある。
このほか、気象観測レーダーは雲の動きを観測し、大気観測レーダーは地上20~30キロメートルの風の動き、温度、密度の分布を恒常的に監視し、地中探索レーダーは深さには限度があるものの100キロヘルツ~1メガヘルツで資源を、1~100メガヘルツで地層や鉱層を、100メガヘルツ~1ギガヘルツで埋没物を、1ギガヘルツ~数十ギガヘルツで地表・地層の状態を探査するのに用いられる。南極では30メガヘルツで深さ1800メートルの氷を観測している。水中では減衰の少ない数十キロヘルツ以下を用いる。ドップラー効果を利用したドップラーレーダーでは、地表に放射した電波の反射を利用して航空機の対地速度などを求めることができる。また、スピードガン(レーダーガン)は球速や自動車の速度を手軽に計測できる。
ミリ波レーダーは到達距離は短いがアンテナ技術やMMIC(モノリシック・マイクロ波集積回路)の開発により、小型・軽量化が進み自動車の衝突予防技術として実用化が進んでいる。また、ミリ波カメラともよばれるミリ波イメージングアレイは、検出素子を面状に配列して各素子に入る反射波を合成して映像(写真)をつくるもので、霧、雲、ダストに強く、火炎を通して撮影できることから、車載用、ヘリコプターなどからの地上監視、火山活動、原子力発電所などの監視に適する。また、事故や災害などで埋没されている生存者の心拍を検出するレスキューレーダーも開発されている。
光波を用いるレーダー(レーザー・レーダー)は、光レーダーの意味でライダーlidar(light radar)ともよばれるが、光が大気中の微粒子や分子による散乱を強く受けることから、火山爆発によるエーロゾル(浮遊微粒子、煙霧質、エアロゾルともいう)、オゾン層、超高層の大気温度の測定に用いられる。
[岩田倫典]
『紀平信著『電波探知機』(1945・広文堂)』▽『伊藤庸二・高橋修一著『レーダー』(1953・興洋社)』▽『吉村義弘・藤森允之著『レーダ工学の基礎』(1971・啓学出版)』▽『関根松夫著『レーダ信号処理技術』(1991・電子情報通信学会、コロナ社発売)』▽『資源観測解析センター編・刊『合成開口レーダ(SAR)』(1992)』▽『藤本京平著『入門電波応用』(1993・共立出版)』▽『吉田孝監修、松村正典ほか著『レーダ技術』改訂版(1996・電子情報通信学会、コロナ社発売)』▽『田中浩太郎編訳・刊『第2次世界大戦におけるレーダー戦争――ドイツのレーダー技術発達史より』(1997)』▽『橋本修・川崎繁男著『新しい電波工学』(1998・培風館)』▽『近藤倫正著『電波情報工学』(1999・共立出版)』▽『高野忠・佐藤亨・柏本昌美・村田正秋著『宇宙における電波計測と電波航法』(2000・コロナ社)』▽『三輪進著『電波の基礎と応用』(2000・東京電機大学出版局)』▽『土木学会編『陸上設置型レーダによる沿岸海洋観測』(2001・丸善)』
出典 小学館 日本大百科全書(ニッポニカ)日本大百科全書(ニッポニカ)について 情報 | 凡例
Sponsored by ![]()
出典 株式会社平凡社百科事典マイペディアについて 情報
Sponsored by ![]()
出典 ブリタニカ国際大百科事典 小項目事典ブリタニカ国際大百科事典 小項目事典について 情報
Sponsored by ![]()
Sponsored by ![]()
夏の暑さに体が慣れること。数日から数十日間で起こる短期暑熱順化と、数年または数世代にかけて起こる長期暑熱順化とがある。→寒冷順化[補説]近年では、冷房設備の普及にともない短期暑熱順化が起こりにくくなっ...