デジタル大辞泉 「ロケット」の意味・読み・例文・類語
Sponserd by ![]()
翻訳|rocket
Sponserd by ![]()
出典 精選版 日本国語大辞典精選版 日本国語大辞典について 情報 | 凡例
Sponserd by ![]()
搭載している推進剤だけで推力を発生するエンジンを装備した飛行体。その機能・能力によって次の二つに大別できる。一つは、人工衛星等を打ち上げるロケット。これを打上げロケットという。もう一つは観測ロケットのように弾道飛行するロケットである。
この項では打上げロケットについて述べる。
[渡辺篤太郎 2017年4月18日]
ロケットは中国の地で発明され、ヨーロッパに伝わり、14世紀には武器として大量に使用された。しかし、この時代のロケットは原始的なもので、これを現在のロケットの出発点とするには難がある。
現在のロケットの原点は、フォン・ブラウンらが開発したドイツ陸軍のA-4ロケットである。従来のロケットにはなかった誘導システムをはじめとして、近代的なロケットの全要素を備えていた。第二次世界大戦中の1942年にA-4試作4号機が水平飛行距離190キロメートルを達成して、初めて成功といえる成績を収めた。A-4はV-2と名を変えて実戦に投入され、750キログラムの炸薬(さくやく)を載せ、ロンドン等に向けて5500機も発射された。
第二次世界大戦後、アメリカとソ連が、V-2の開発関係者、多数のV-2とその技術資料等を接収し、その後のロケット開発に活用した。
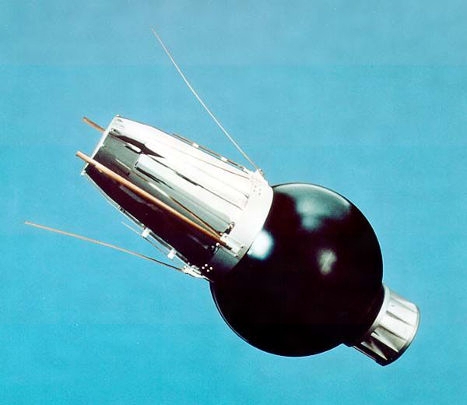
1957年7月から翌1958年末までを国際地球観測年(IGY:International Geophysical Year)とし、国際協力により大気上層の気象、電離層等の観測が実施された。アメリカとソ連は、人工衛星を打ち上げてIGYに参加するとしていた。IGY開始直後の10月4日、ソ連は世界初の人工衛星スプートニク1号を、1か月後にライカ犬を乗せた同2号を打ち上げた。このロケットは、現在有人宇宙船を打ち上げているソユーズロケットの初期モデルで、大陸間弾道ミサイルを改修した打上げロケットである。
アメリカは、バンガードロケットでIGYが始まる7月1日に人工衛星を打ち上げる計画であったが、手間どっているうちにソ連に先を越された。慌てたアメリカは開発を急ぎ、12月6日に打上げにこぎつけたが、発射直後に墜落、炎上して失敗に終わった。急遽(きゅうきょ)フォン・ブラウンチームが起用され、翌1958年2月1日ジュピターCロケットでアメリカ初の人工衛星エクスプローラ1号の打上げに成功した。しかし、アメリカのエクスプローラ1号は14キログラムであるのに対してソ連のスプートニク1号は84キログラム、同2号は508キログラムもあり、アメリカの威信は深く傷ついた。技術的に後れをとっただけではなく、安全保障上の脅威が鮮明になった。ソ連のロケットは、核弾頭を世界の任意の地点に運ぶことができるが、アメリカのロケットはできない。この脅威をスプートニク・ショックという。以後、米ソ両国は、月・惑星の探査、有人宇宙飛行、ロケットの高性能化等で熾烈(しれつ)な競争を展開する。
1961年5月、アメリカ大統領ケネディは「1960年代の終わりまでに、月に人間を着陸させ、無事に帰還させる」と宣言し、逆転して優位にたつべくアポロ計画に着手した。宣言通り1969年7月船長アームストロングと飛行士オルドリンEdwin Eugene Aldrin Jr.(1930― )が搭乗したアポロ宇宙船が月面に着陸し、4日後地球に帰還した。この競争を通じて米ソのロケットは急速に進歩し、アメリカにおいては、デルタ、アトラス等が、ソ連では、ソユーズ、プロトン等が頻繁に打ち上げられた。また、この競争のかたわらで、気象衛星、航行衛星、通信衛星、測地衛星等が打ち上げられ、宇宙利用の可能性・有益性が次々に実証された。これを傍観していれば、打上げ手段をもつ米ソに宇宙利用を独占されかねなかったため、米ソを追って、フランス、イギリス、イタリア、日本、中国、インド等が相次いで宇宙開発に参入した。
アポロ計画終了後アメリカは、宇宙への片道輸送から往復輸送へのステップアップ、有人宇宙活動の拡大、宇宙輸送コストの低減等を目ざしてスペースシャトルを開発した。短距離旅客機B-737とほぼ同じ大きさのオービター(軌道船)が宇宙から帰還し、再使用された。オービターは5機製作され、135回飛行し2011年に退役した。この間に搭乗員をも失う大事故を2回起こしている。ソ連もスペースシャトル型のロケット「ブラン/エネルギア」を開発したが、1回飛行しただけで終わった。
安全で運行費が安いスペースシャトル型のロケットを開発するには、大きな技術革新が必要で、現用は「使い切り」または「使い捨て」とよばれる片道輸送のロケットである。宇宙飛行士と少量の物資の帰還は、カプセル型宇宙船によっている。
ロケットで人工衛星等を打ち上げた国や機関は、2016年末時点で12ある。ヨーロッパを1国、ロシアとウクライナを1国とし、他国のロケットを使用した国や打上げ機数が非常に少ない国を除くと、自国の衛星を自国の射場から自国のロケットで打ち上げて宇宙開発利用を行っている国は、ロシア、アメリカ、日本、中国、ヨーロッパ、インドの6か国である。
[渡辺篤太郎 2017年4月18日]
1952年(昭和27)サンフランシスコ講和条約が発効し、航空機の研究が解禁された。このとき世界はプロペラ機からジェット機の時代に変わりつつあった。
東京大学生産技術研究所(生研)教授の糸川英夫(いとかわひでお)は、遅ればせながらジェット機の研究をするよりも、超高層を飛行する「ロケット機」を研究しようと思い立った。糸川は、研究班を組織してロケットの研究に着手し、1955年3月から4月にかけて東京国分寺(こくぶんじ)にて直径1.8センチメートルのペンシルロケットの発射実験を実施した。
このころ、地球物理学者から「ロケット観測で国際地球観測年(IGY)に参加したい」という要望が示された。首尾よくロケットの研究・開発計画とロケットを必要とする計画が出会い、一気に研究が加速された。当初は不具合の連続であったが、1958年6月、全長5.4メートルの2段式観測ロケットK-6型の2号機が高度約60キロメートルに達し、観測に供せるめどが立った。IGY終了までに13号機まで打ち上げられた。以降も大型化、高性能化が図られ、やがてエネルギー的には人工衛星を軌道に投入できるようになった。
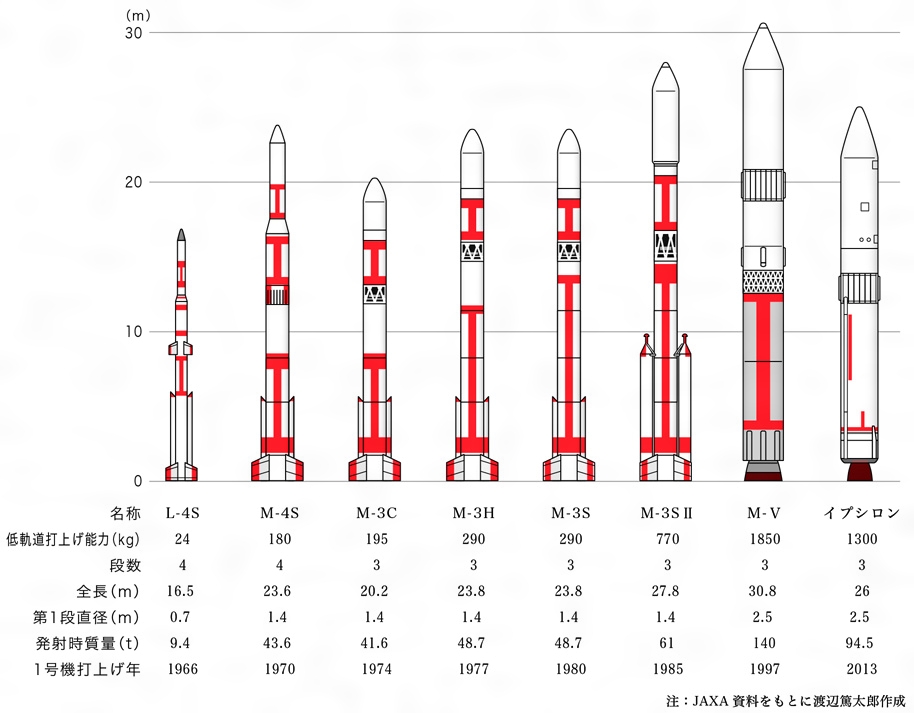
初めて人工衛星の打上げに挑戦したのは、1966年9月のL-4Sロケット1号機であるが、第3段の姿勢異常により失敗に終わった。2号機から4号機まで、さまざまな原因で失敗が続いた。この試練を通じて技術は飛躍的に向上し、1970年2月、5号機が24キログラムの人工衛星「おおすみ」を軌道に投入。日本は、世界で4番目に自主技術で人工衛星を打ち上げた国になった。この成功を受けてM-4Sロケットによる本格的な科学衛星の打上げに移行した。以後M-3C、同3H、同3S、同3SⅡ、M-Ⅴに発展した。
Mロケットは、計30機発射され、26機成功し、28機の科学衛星、惑星探査機等を軌道に投入し、日本のロケット技術の向上のみならず、世界の宇宙科学の発展に貢献した。M-Ⅴは、2006年の打上げを最後に退役し、後継機として現用のイプシロンロケットが開発された。この系列のロケットはすべて、主推進系に固体推進剤を使用していること、比較的小型で取扱いが容易であることが特徴であるが、開発の進め方にも特徴があった。ロケットの開発・打上げを研究・実験の場ととらえ、研究成果を順次採り入れた。また、事業規模の拡大等に伴って、組織も東大生研から1964年に東大宇宙航空研究所に、さらに1981年に文部省宇宙科学研究所に改組・拡充された。
日本は、もう一つの系列のロケットを開発してきた。1960年代前半、日本も実用衛星を打ち上げたい、という要望が高まった。多くの実用衛星が利用する軌道は赤道上空約3万5800キロメートルの静止軌道で、ここに打ち上げるには大型で軌道投入精度の高いロケットが必要になる。この状況を背景に、1960年度科学技術庁に予算が認められ、小型液体ロケット(液体推進剤のロケット)の試作試験が始まった。
実用衛星打上げ用ロケットの開発開始は1960年代中期で、2段階で目標を達成する計画であった。第1段階では、Mロケットの固体ロケット(固体推進剤のロケット)技術と、研究中の液体ロケット技術を組み合わせてQロケットを開発し、技術の向上を図る。Qは、全長25メートル、発射時質量51トン。高度1000キロメートル円軌道への打上げ能力目標は約85キログラム。第2段階で、Qを基にNロケットを開発し、1974年度までに100キログラムの静止衛星を打ち上げるというものであった。
また、日本の宇宙開発の目標・体制等に関する政府の検討・議論もしだいに収束し、1967年末に結論がまとまった。国の事業として宇宙開発を積極的に推進するとし、1968年に計画を審議決定する宇宙開発委員会が、翌1969年に宇宙開発事業団(NASDA(ナスダ))が設立された。Q・N計画はNASDAに引き継がれ、詳細な検討が行われた。その結果、課題が相当あるため所定の期間内に開発を完了することは困難であることが明らかになった。一方1967年の日米首脳会談で、アメリカからの技術導入が可能になった。
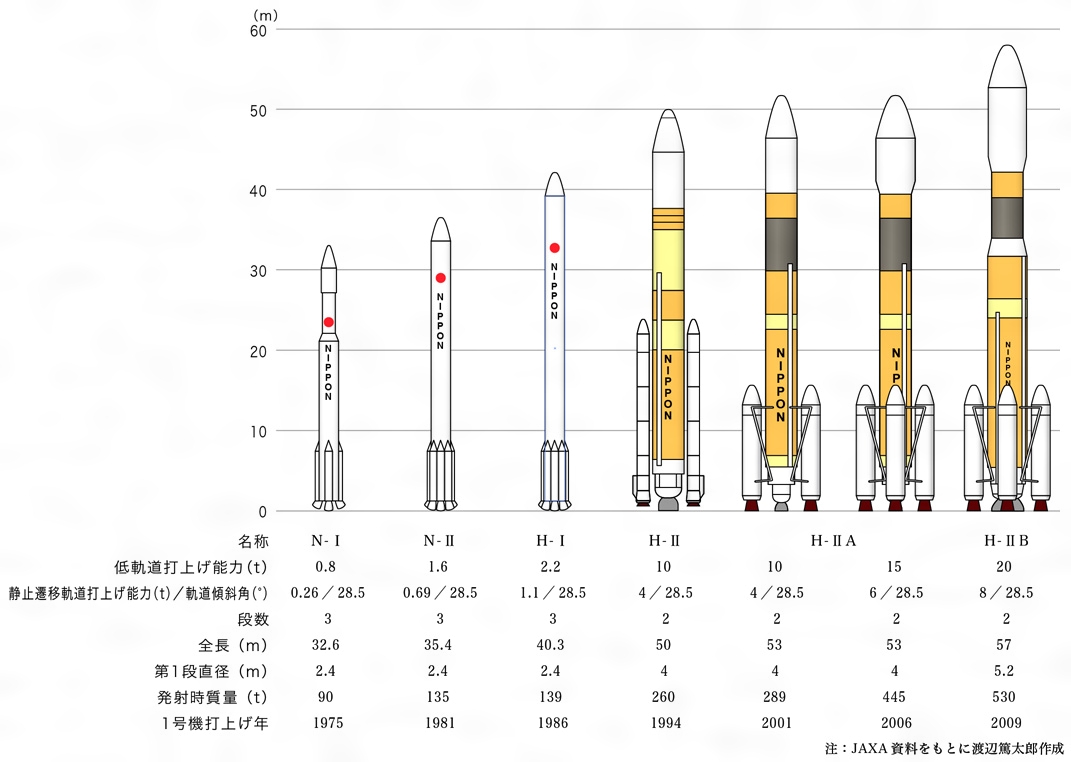
1970年、Q・N計画は、導入技術を活用してN(後にN-Ⅰに改称)を開発する計画に変更された。このため、新旧のNロケットはまったくの別物である。N-Ⅰの第1、3段、補助ロケットおよび最先端部の保護カバーであるフェアリングはアメリカから購入した。搭載機器は一部アメリカから購入し、ほかは国内で開発した。第2段は、Q用に開発中であった液体ロケットを、アメリカの技術援助を受けながら開発した。各種管理プログラム、設計解析手法等の技術一式が開示された。なお、購入品は順次国内でのライセンス生産に切り替えられた。N-Ⅰは、全長約33メートル、発射時質量約90トン、静止遷移軌道打上げ能力260キログラム(静止130キログラム相当)。第1、2段は電波誘導である。
1975年に1号機が「きく1号」を高度1000キロメートルの円軌道に、1977年に3号機が「きく2号」を静止遷移軌道に打ち上げた。計7機発射され6機成功した。
N-Ⅰの開発と並行して「新たな技術導入で早急に打上げ能力を向上する案」と「自主技術で打上げ能力を向上する案」が検討された。前者がN-Ⅱロケットに、後者がH-Ⅰロケットになった。
N-Ⅱは、計8機すべて成功し、気象・通信・放送の静止衛星を計6機、低軌道観測衛星を1機所定の軌道に投入し、日本の宇宙利用の発展に貢献した。
H-Ⅰで自主開発する重要項目は、液体酸素(液酸)・液体水素(液水)推進剤の第2段、慣性誘導システムおよび第3段固体ロケットであるが、大きな課題は第2段の液酸・液水エンジンであった。N-Ⅰ、Ⅱを開発していた期間約10年がその技術研究にあてられ、H-Ⅰ自体の開発はN-Ⅱ1号機の打上げ成功後に行われた。H-Ⅰ第1段はN-Ⅱ第1段と同じであるが、第2段の高性能化により静止遷移軌道打上げ能力は1.1トン(静止550キログラム相当)に向上した。1986年の1号機から計9機すべて成功し、静止衛星6機、低軌道観測衛星3機、小型衛星等4機を所定の軌道に投入した。宇宙利用の発展を図りつつ、大型ロケット技術の基礎を築いた。
宇宙利用の進展は目覚ましく、さらなる打上げ能力向上、低コスト化等が必要になり、1986年全段自主技術の後継機H-Ⅱロケットの開発に着手した。
H-Ⅰ第2段の技術を基に直径4メートルの大型第1段を自主開発、第2段にはH-Ⅰ第2段の改良型を使用、固体ロケットブースターはMロケットの技術を基に開発、フェアリングは初めて自主開発した。打上げ能力は静止遷移軌道へ3.8トン(静止2トン相当)。1トン級静止衛星2機を同時に打上げ可能。この能力は1990年代の世界の大型ロケットに比肩した。1994年(平成6)の1号機から3号機までの打上げ成功で試験段階を終了し、日本は国際的な水準の技術、打上げ能力を得た。H-Ⅱは運用段階に移行し、同時に後継機の検討が行われた。
その後も宇宙利用・宇宙科学の進展は目覚ましく、また国際宇宙ステーション(ISS)等の新分野も加わり、「ISSへ年間6トン程度の物資の補給」、「2~4トン級静止衛星の打上げ」等、多様な要求に低コストで対応することが求められた。多様な要求に応えるため、いわゆるロケットのファミリーを開発することになった。ファミリーの基本であるH-ⅡAロケットは、1994年に第2段の開発に、1996年に全体の開発に着手した。
一方H-Ⅱの打上げは、5番目の打上げまでは完全な成功であったが、6番目(1998年2月発射)は第2段エンジンの故障により失敗した。7番目(1999年11月)は第1段エンジンが計画より早く停止して小笠原(おがさわら)諸島父島(ちちじま)の北西の海上に落下した。第1段エンジンの液水ポンプ周辺に原因があることは明らかになったものの、問題点の特定には非常な困難が予想された。そんなとき、海洋科学技術センターの協力によりエンジンの探査を試みることになった。エンジンが横たわる海底は3000メートル級の深海であるため不可能かと思われたが、12月末にはエンジンが発見された。翌2000年(平成12)1月末、サルベージ会社により回収され、液水ポンプ入口にあるインデューサの一部が疲労破壊したことが明らかになった。
H-ⅡA開発は、H-Ⅱの2機連続失敗により、抜本的な見直しが必要になった。1号機の打上げを1年半延期し、開発体制の刷新・強化、開発試験等の強化、開発の詳細を点検・評価する方法の革新等を図った。3機連続失敗は許されない状況のもと、2001年8月H-ⅡA1号機の打上げに成功した。2017年時点で、H-ⅡAとその姉妹機であるH-ⅡBロケットが運用されている。
[渡辺篤太郎 2017年4月18日]
現在アメリカの主要ロケットは、デルタⅣ、アトラスⅤ、ファルコン9である。
デルタとアトラスは1950年代から使われ、アメリカでもっとも多数打ち上げられたロケットシリーズである。デルタⅣとアトラスⅤは、1990年代後半にアメリカ空軍のEELV(Evolved Expendable Launch Vehicle)計画で開発され、2002年にそれぞれ1号機が打ち上げられた。射場設備や生産設備を含めてほぼすべてを刷新したロケットで、中型から超大型衛星まで広範な打上げに対応できるロケットのファミリーである。フロリダ州のケープ・カナベラル空軍基地およびカリフォルニア州のバンデンバーグ空軍基地から打ち上げられる。おもにアメリカ政府・軍の人工衛星の打上げに使用されている。
ファルコン9は、2002年に設立されたベンチャー企業、スペースX社Space Exploration Technologiesが開発した低コストロケットである。2010年に1号機が打ち上げられた。同程度の打上げ能力をもつ他のロケットに比べて安価で、商業打上げサービス市場で大きなシェアを得ている。ケープ・カナベラル空軍基地、バンデンバーグ空軍基地、ケネディ宇宙センターから打ち上げられる。打上げ後の第1段の回収および再打上げに成功しており、第1段の再使用により、さらなる打上げ価格の低減を目ざしている。
なお、アメリカでは、有人火星探査等を目標にした大型ロケットの開発、民間企業による低コストロケットの開発等が進められており、近い将来複数の新機種が加わる予定である。
[渡辺篤太郎 2017年4月18日]
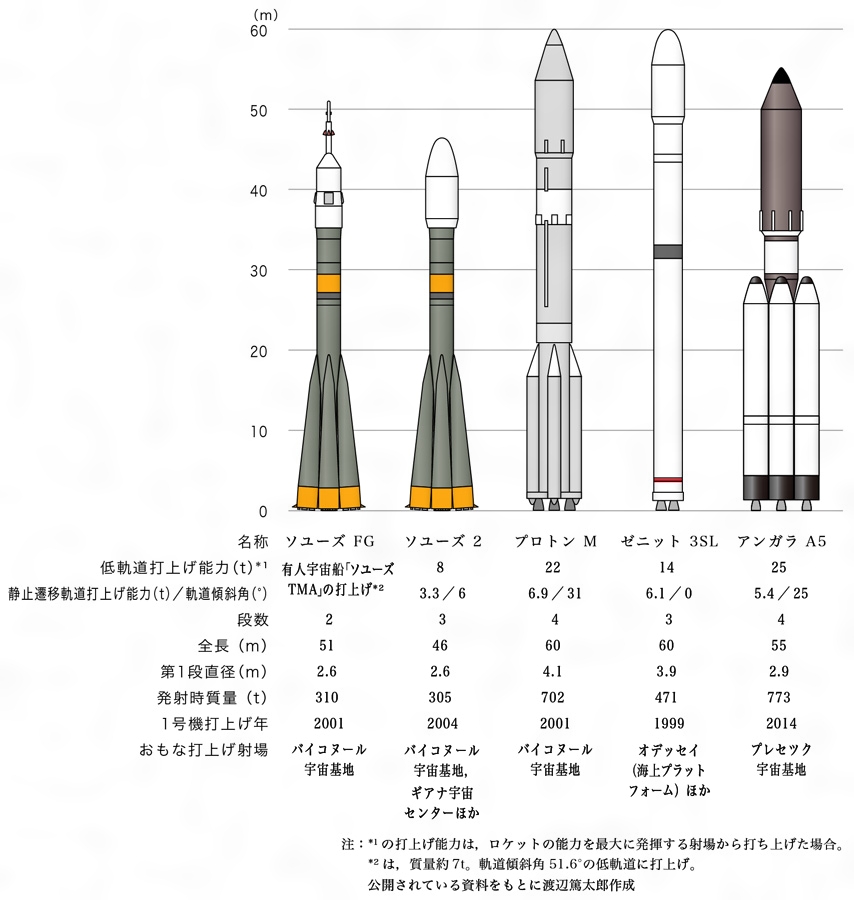
ソ連の流れをくむ現用の主要ロケットは、ソユーズ、プロトン、ゼニット、アンガラである。ソ連崩壊後、ゼニットはウクライナ、その他はロシアに属する。ソユーズ、プロトン、ゼニットについては、部分的な改良は逐次行われているものの、初打上げ以来基本的な構成は変わっていない。
ソユーズの系統のロケットは、世界初の人工衛星打上げから使われており、世界でもっとも多数打ち上げられたロケットである。アメリカのスペースシャトルが退役した後、国際宇宙ステーションに宇宙飛行士を送ることができる唯一のロケットである。
アンガラは、複数の形態があり、比較的小型の衛星から大型の衛星までを打ち上げることができるロケットのファミリーである。旧来からの打上げロケットを刷新する目的で1990年代後半に開発に着手したが、財政難により開発は遅れ、1号機の打上げは2014年になった。
おもな射場は、バイコヌール宇宙基地とプレセツク宇宙基地である。両射場は高緯度にあるため、極軌道等の軌道傾斜角(軌道面と赤道面のなす角)が大きい軌道への打上げが多く、静止衛星の打上げは少ない。ソ連崩壊後、バイコヌール宇宙基地がある地域はカザフスタン領になった。使用料を払わなければならないこと、ヒドラジン系推進剤による環境汚染が大きな問題になったことから、ロシア領内(極東のアムール州)に新射場「ボストチヌイ宇宙基地」の建設を進めてきた。新射場は、2016年4月にソユーズ2ロケットを打ち上げて一部の運用を開始した。
ソ連崩壊後、ロケット製造機関・企業と欧米の企業との協働で商業ベースでの打上げサービスが提供されている。これらのロケットは、豊富な打上げ実績をもつにもかかわらず、近年打上げ失敗がやや多い。
[渡辺篤太郎 2017年4月18日]
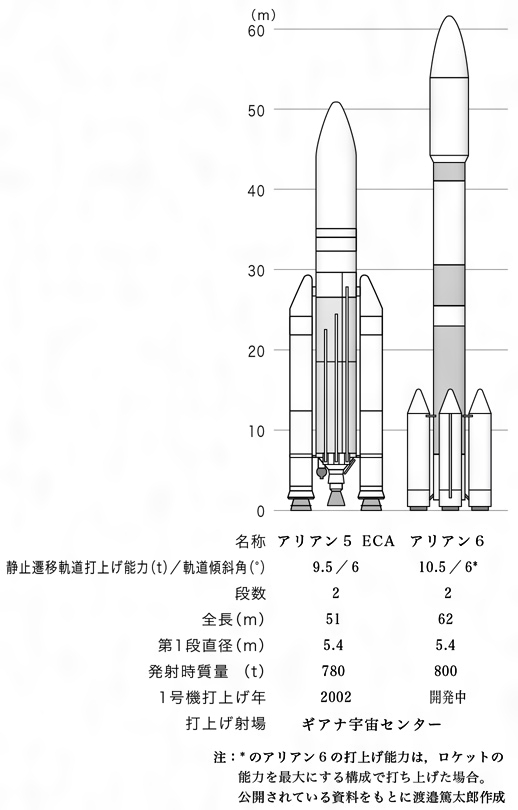
ヨーロッパ宇宙機関(ESA(イーサ))が開発した現用の主要ロケットはアリアン5である。1980年代後半に開発に着手し、1996年に1号機が打ち上げられた。当初、大型の静止衛星の効率的な打上げ、小型有人スペースシャトル「エルメス」の打上げが目的であったが、後者は後にキャンセルされた。アリアン4までは前機種の改良型であったが、アリアン5はほぼすべてが新規開発である。打上げは、ギアナ宇宙センター(北緯5.2度)から、アリアンスペース社によって商業ベースで行われている。射場が赤道に近いため静止衛星の打上げに有利で、実際打ち上げた衛星の大多数が静止衛星である。世界の商業打上げサービス事業の分野でもっとも成功したロケットといえる。
開発完了から長期間経過したこと、商業打上げサービス分野の競争がいっそう厳しくなってきたことから、1号機の打上げ目標を2020年として後継機アリアン6の開発が行われている。
[渡辺篤太郎 2017年4月18日]
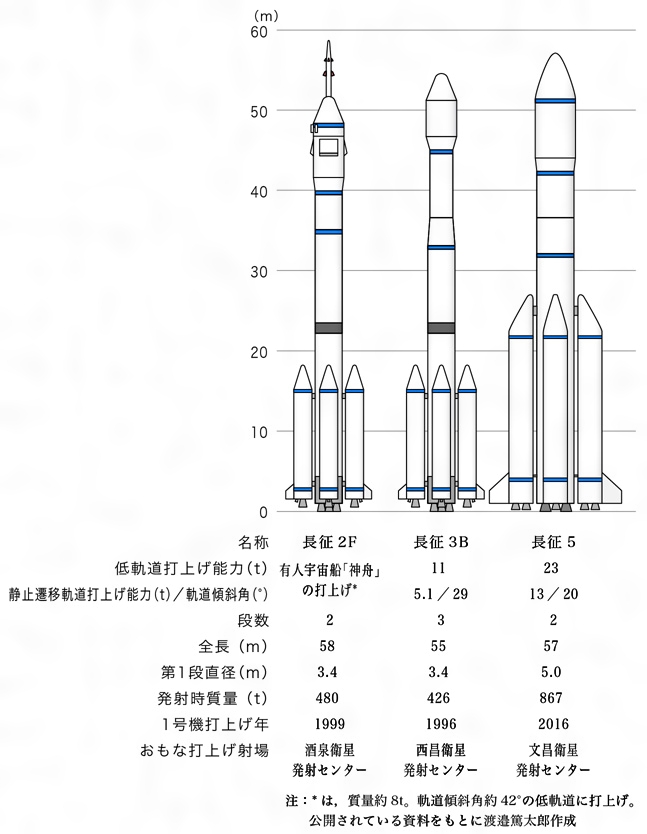
中国は近年、多種多様なロケットを開発し活発に打ち上げている。2010年代前半の打上げ実績をみると、長征2のC、D、F型、長征3のA、B、C型、長征4のB、C型、長征5、長征6、長征7、長征11、快舟の13機種にもなる。長征5、6、7、11、快舟は2010年代になってから登場した機種である。打上げ機数は年平均17機で、ロシア・ウクライナのロケットに次ぎ、アメリカと並んで多く、大多数は政府・軍の衛星等の打上げである。有人宇宙船「神舟」の打上げには長征2Fが、静止衛星の打上げにはおもに長征3の各型が使われている。
海南島に新設された射場「文昌(ぶんしょう)衛星発射場」から2016年11月に1号機が打ち上げられた長征5は、世界最大級の打上げ能力をもつ大型ロケットで、中国独自の宇宙ステーションの建設等に使用される。
[渡辺篤太郎 2017年4月18日]
インドの現用ロケットはPSLV(Polar Satellite Launch Vehicle)とGSLV(Geosynchronous Satellite Launch Vehicle)である。
PSLVは、地球観測衛星を極軌道に打ち上げることを主目的として開発された比較的小型のロケットである。2010年代前半の実績では年間2~4機打ち上げられている。
GSLVは、静止衛星の打上げを主目的に、PSLVを基に開発したロケットで、静止遷移軌道に2トン強(静止1トン強相当)の打上げ能力がある。
2003年に第3段にロシア製液酸・液水エンジンを使用したMk.Ⅰ型の打上げに成功した。その後、自主開発した液酸・液水エンジンに換装したMk.Ⅱ型が開発された。打上げは数年に1機のペースである。打上げ成功率は低い。
現在2トン級静止衛星を打ち上げることができるMk.Ⅲ型の開発が進められている。このロケットは、Mk.Ⅱ型の改良型ではなく、新規開発である。
[渡辺篤太郎 2017年4月18日]
日本の現用の大型ロケット、H-ⅡA、H-ⅡBは、打上げ能力、打上げ成功率等あらゆる面で、上記の世界の主要ロケットに比肩する。詳細は、H-ⅡA、H-ⅡBの項参照。
[渡辺篤太郎 2017年4月18日]
もっとも身近なロケットはゴム風船であろう。風船を高く飛ばす秘訣(ひけつ)は、軽い風船を大きく膨らませること、中の空気を勢いよく噴射させることである。これをロケットらしくいい換えると、「優れたロケットを実現するには、機体を軽くし推進剤を多く搭載すること、エンジンの排気を高速にすること」となる。
ロケットの父、ツィオルコフスキーが導いた公式がこれを証明している。

V軌道は、全推進剤を消費したときに得られる速度で、人工衛星の軌道速度に等しくなければならない。たとえば、低軌道を周回する場合7.7キロメートル毎秒という高速である。
Cエンジンは、エンジンの排気速度で、大きなV軌道を実現するためにできるだけ大きくしたい。高性能な液酸・液水エンジンで、4500メートル毎秒(注記:厳密には有効排気速度)の排気速度が実現されている。
自然対数ln内も大きくしたい。推進剤以外の質量M機体には人工衛星の質量も含まれるが、人工衛星の質量は与えられるものであるから除外して考える。すなわち、人工衛星を除く機体の全備質量に対して推進剤が占める割合(推進剤質量比)をできるだけ大きくしたい。
V軌道が非常に大きいため、機体は極限まで軽くされる。軽い液水燃料(約70キログラム毎立方メートル)のH-ⅡA第1段でも、推進剤質量比は89%という高い値である。
空気抵抗や重力等によりロケットの増速能力の一部が損なわれる。これを損失速度V損失という。代表的な値は2.5キロメートル毎秒程度。
V初速は発射時にロケットがもっている速度である。種子島(たねがしま)宇宙センターの自転速度は約400メートル毎秒であるから、真東に飛行する場合はこの値が初速になる。
なお、一般に「排気速度」よりも「比推力」が多用されている。
比推力の定義は、「エンジンの全力積(推力×運転時間)」を「消費した推進剤の重量」で割った値である。つまり、推力を1秒間に消費する推進剤の重量で割った値である。単位「秒」をもつが、直接計測することはできない。
比推力がわかりにくい場合は、「比推力×重力加速度(9.81メートル毎秒毎秒)=排気速度」であるから、比推力を10倍して排気速度に置き換えるとよい。
ただし、厳密には、比推力に重力加速度をかけて得られる値を「有効排気速度」という。
エンジンの推力は、運動量推力と圧力推力の合計で、前者はガスの噴出で発生し、後者はノズル出口における圧力差(下式)で発生する。
圧力推力=ノズル出口面積×(ノズル出口のガスの圧力-エンジンの周囲の圧力)
有効排気速度は、圧力推力分を排気速度に換算して実際の排気速度に加えたもので、エンジンの諸元、運転環境による。真空中と地上における有効排気速度(または比推力)の差は20%以下である。
[渡辺篤太郎 2017年4月18日]
人工衛星を軌道に投入するためにはきわめて大きな増速が必要で、現在の技術では1段のロケットでこれを実現することはむずかしい。このため、第1段の上に第2段を、必要に応じてさらに上段を載せる。第1段の横面に別のロケットを装着する例も多い。これを多段式ロケットという。
多段式ロケットは、推進剤を使い尽くした機体を切り離し、身軽になって加速するため、効率よく増速できる。役割が終わった下段を発射台として、推進剤を満載した上段が発進するシステムとみてもよい。計算上は段数を多くするほどロケットを小型化できる。ただし、段数を多くすると、部品数が多くなる、その結果故障が発生するリスクが高まる等の欠点があるため、段数を少なくする努力が払われている。
日本のロケットも技術の進歩に伴って段数を少なくしてきた。M-4Sは4段式であったが、次のM-3Cからは3段式、N-ⅠからH-Ⅰまでは3段式であったが、H-Ⅱ以降は2段式である。
[渡辺篤太郎 2017年4月18日]
H-ⅡAで静止衛星を打ち上げる方式を解説する。
ロケットは、種子島宇宙センターから東に向かい、第2段推進剤の約3分の2を消費して7.7キロメートル毎秒の速度になり、高度約250キロメートルの低軌道に乗っていったんエンジンを停止する。この軌道をパーキング軌道といい、軌道傾斜角は約30度である。赤道上空に達したときエンジンを再始動して10.2キロメートル毎秒に増速し、静止遷移軌道に移行する。この軌道の遠地点は静止軌道と接する。ロケットは静止遷移軌道上で人工衛星を分離して役割を終える。
人工衛星は、静止遷移軌道を上昇するにつれて徐々に速度を失い、遠地点で1.6キロメートル毎秒になる。このとき人工衛星のエンジンを運転して3.1キロメートル毎秒に増速し静止軌道に移行する。おもに静止遷移軌道から静止軌道に移行する際に、軌道傾斜角を0度に修正する。
数百~千キロメートル程度の低・中高度軌道に衛星を打ち上げる場合は、一般に第2段推進剤がほぼ枯渇するまでエンジンを連続運転し、直接目的の軌道に乗せる。
[渡辺篤太郎 2017年4月18日]
緯度ψ(プサイ)の射場からロケットを真東に発射すると、軌道傾斜角はψになる。発射方向をどのように変えても、軌道傾斜角はψより大きくなる。これは地球儀を使うと容易に確認できる。悪いことに、射場の緯度より小さい軌道傾斜角の軌道に直接打ち上げることはできない、ということである。
このため、緯度30度の種子島宇宙センターから、軌道傾斜角0度の静止軌道に打ち上げる場合には、まずパーキング軌道に乗って赤道上空に行き、そこで軌道高度と軌道傾斜角を変更して静止軌道に移行するという複雑な飛行方式になる。
赤道上の射場は、軌道傾斜角の変更が不要になり、加えて地球自転速度が最大になるため、静止衛星の打上げに有利である。
[渡辺篤太郎 2017年4月18日]
固体ロケットは、酸化剤、燃料、結合剤等を混合・固化し、燃焼室内に収納する方式で、液体ロケットは、推進剤をタンクに搭載し、これを燃焼室に供給する方式である。
固体ロケットは、推進剤を移送する必要がないため機構が簡素で、点検・整備等が容易である。推進剤に点火すると直ちに推力を発生し、燃え尽きるまで作動する。
反面、燃焼室が推進剤タンクを兼ねていて高温高圧になるため、大型化すると機体が重くなる。また、運転停止・再始動が困難で、一般に増速量の制御が容易ではなく、飛行経路・軌道の誤差が大きい。
液体ロケットは複雑である。推進剤をエンジンに供給する機構は、小さなロケットの場合はタンク上部にガスを供給して推進剤を圧送する方法が使われるが、ポンプで圧送する方法が一般的である。高温高圧になる部分はエンジンだけであるため、大型ロケットを軽くつくることができる。任意の時点でエンジンを停止・再始動でき、増速量の制御は容易である。
酸化剤または燃料の一方が尽きた時点でエンジンを運転できなくなり、残存分がむだになること、推進剤液面が揺れて姿勢不安定になるおそれがあること等、固体ロケットにはない課題がある。
機体の姿勢を制御するための推力偏向機構も大きく異なる。固体ロケットではノズルを自在に傾けられるようにするが、高温高圧で大きな力が働くノズルを可動式にするのは容易ではない。可動ノズルは比較的新しい技術である。液体ロケットでは、初期からエンジン全体を油圧アクチェーター等で傾ける方法が採用されてきた。なお、ロール(機軸周り)制御、エンジン停止中の3軸制御は、別にスラスターとよばれる小型ロケットエンジンを噴射して行う。
このような特質により、小型の打上げロケットや大型ロケットの補助ロケットには固体ロケットが多く、大型ロケットには液体ロケットが多い。
[渡辺篤太郎 2017年4月18日]
第二次世界大戦中にドイツで開発されたV-2の推進剤は液酸と75%エチルアルコール(水25%)で、排気速度は約2300メートル毎秒。その後液酸とケロシン等で若干向上したが、飛躍的な向上は液酸と液水の組合せで実現し、排気速度は約2倍になった。
排気速度は、噴射するガスが軽いほど高くなる性質がある。水素の燃焼ガスは水蒸気で、アルコールやケロシンの燃焼ガスより軽いため、排気速度は高くなる。もっとも軽い物質は水素だから、たとえば水素を原子力で加熱するともっとも高い排気速度が得られる。
[渡辺篤太郎 2017年4月18日]
ポンプ付きエンジンの場合、ポンプを回すタービンの系統の違いによりいくつかの型式がある。
H-ⅡAの第1段エンジン(LE-7A)に採用されている型式を二段燃焼サイクルという。タンクから供給される液水は、ポンプで昇圧され、ノズルと燃焼室の壁の中を流れてこれらを冷却し、予備燃焼室に送られる。液酸の多くは、ポンプで昇圧され、直接主燃焼室に送られる。少量の液酸は、ポンプでさらに昇圧され、予備燃焼室に送られる。予備燃焼室で、多量の水素と少量の酸素が燃焼し、比較的低温の燃焼ガスになる。このガスを、ポンプを駆動するタービンに供給する。タービンを駆動した後のガスは主燃焼室に送られ、酸素と混合して燃焼し高温高圧になる。この燃焼ガスは、ノズル内で膨張しつつ高速になって噴出し推力を発生する。
予備燃焼室では、少量の水素と少量の酸素を燃やし、タービンを駆動した後、このガスを外部に排出してしまう型式(ガス発生器サイクル)、予備燃焼室をもたず、ノズルや燃焼室を冷却する際に熱を得た水素ガスでタービンを駆動する方式(エキスパンダーサイクル)等、さまざまなサイクルがある。
ガス発生器サイクルに比べて二段燃焼サイクルは、全推進剤が推力の発生に寄与するため高性能である。しかし、タービン駆動ガスを主燃焼室に供給しなければならないため、エンジン各部が超高圧になる。また大馬力のタービンおよびポンプが必要になる。このため開発には高度な技術が必要である。
[渡辺篤太郎 2017年4月18日]
燃焼ガスを加速・噴出する部分を、ノズルという。もっとも細い部分をスロート、その下流をスカートという。スカートの大きさを、開口比(スカート出口とスロートの面積比)で表す。
燃焼ガスは、断面積の減少に伴って増速し、スロートで音速に達する。その後は断面積を増すと増速する。開口比を大きくするほど排気ガスは高速になる。
ガスの速度が増すにつれて圧力は低くなる。第1段エンジンのように大気圏内で運転する場合、ガスの圧力が大気圧以下になると、ガスの流れが剥離(はくり)して正常な運転ができなくなる。高い排気速度を得るために開口比を大きくしたいが、それには燃焼圧を高くする必要があり、一般に第1段エンジンは高圧燃焼である。第2段エンジンは真空中で運転されるため、比較的低い燃焼圧でも開口比を大きくできる。
H-ⅡAの第1段エンジンは、燃焼圧12.3メガパスカル、開口比46.7で、真空中有効排気速度4315メートル毎秒。同第2段エンジンは、燃焼圧3.6メガパスカル、開口比110で、真空中有効排気速度4384メートル毎秒である。
[渡辺篤太郎 2017年4月18日]
ロケットの場合、一般に「誘導」は「航法」を含む。ここでもこの慣習に倣う。
ロケットには、あらかじめ作成した飛行計画に基づいて姿勢プログラムを内蔵しておく。あらゆる誤差がない場合、このプログラム通り飛行すればロケットは所定の軌道に達する。しかし実際にはしだいに予定の飛行経路からずれる。これを検知し修正するのが誘導である。
ロケットの誘導方式は、電波誘導と慣性誘導に大別される。電波誘導は、地上のレーダーで計測したロケットの位置情報に基づき、地上の計算機で航法・誘導計算を行って飛行経路のずれを算出し、修正信号を電波で送る方式である。誘導用の地上局が必要になるが、ロケット搭載機器の負担は軽い。慣性誘導は、機体に搭載した加速度計およびジャイロの出力から、機上の計算機で航法・誘導計算を行う方式である。誘導用の地上局は不要であるが、ロケット搭載機器の負担は大きい。
加速度計とジャイロを機体に搭載する方法にプラットフォーム式とストラップダウン式がある。プラットフォーム式は、ジンバルで支持されたプラットフォームの上にこれらのセンサを取り付ける方式である。プラットフォームは、機体の姿勢が変化してもつねに発射時の姿勢を保つように制御される。プラットフォームと機体の角度からロケットの姿勢を知る。ストラップダウン式は、機体に直接センサを取り付ける方式で、ジャイロの出力を連続的に計算処理して姿勢を求める。
プラットフォーム式では、プラットフォームとその姿勢を一定に保つ計測・制御系が必要になるためハードウェアは複雑になるが、計算機の負担は軽い。ストラップダウン式では、計算機の負担は重くなるが、プラットフォームがないためにハードウェアは小型・軽量になる。
最近の大型ロケットの多くは、ストラップダウン式の慣性誘導を採用している。
[渡辺篤太郎 2017年4月18日]
近未来の重要課題は、打上げ成功率の向上と打上げ費用の低減である。
2010年代前半の打上げ実績では、年間70~90機発射され、このうち数機は失敗している。打上げ費(ロケット製作費、射場作業費等の合計)は、目覚ましく低減しているものの、まだ静止衛星1キログラム当り数百万円と高額である。打上げ失敗のリスクがあり大きな費用が必要であるが、打ち上げた衛星等から多大な効果がもたらされる。「ひまわり」などの気象衛星によって撮影された画像、通信・放送衛星によるスポーツやニュースの同時中継、航行測位衛星によるナビゲーション、宇宙望遠鏡や「はやぶさ」などの宇宙探査機がもたらす新たな知見等、身近な成果も多岐にわたる。いっそうの打上げ成功率の向上、打上げ費用の低減が実現すれば、宇宙はさらに有益になる。
これを実現する有力な方法の一つが、現在は1回しか使われないロケットを、再使用型にすることであると考えられている。
究極の宇宙輸送システムは、「地上と低軌道間を往来する再使用ロケット」、「低軌道を拠点として宇宙空間を往来する再使用ロケット」、「両者の中継基地」の3点からなるとされている。
地上と低軌道間を往来するロケットには、過酷な空力加熱に耐える熱防御系や着陸装置等が必要になる。またエンジンには自重を上回る大推力が必要になる。しかし、宇宙空間だけを飛行するロケットには、これらの装備や要求がない。したがって、分業し、それぞれの要求・制約に対してロケットを最適化すれば、効率のよい宇宙輸送を実現できると考えられる。
[渡辺篤太郎 2017年4月18日]
『的川泰宣著『トコトンやさしい 宇宙ロケットの本』第2版(2011・日刊工業新聞)』▽『渡辺篤太郎著『H-ⅡA/H-ⅡBロケットへの道のり』(2017・日本ロケット協会)』

ジュピターCロケット
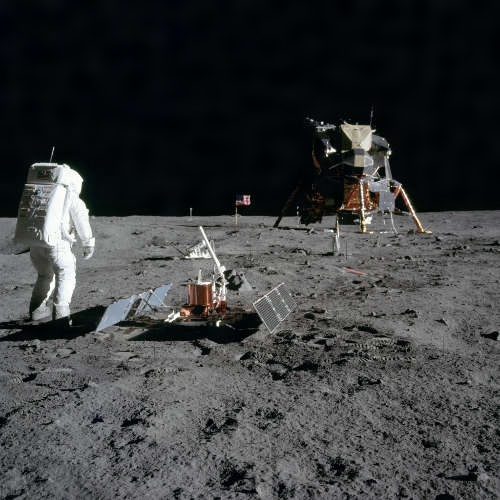
アポロ11号による人類初の月面着陸と月…

月から帰還したアポロ11号の司令船

スペースシャトルの打上げ

スペースシャトルのオービター
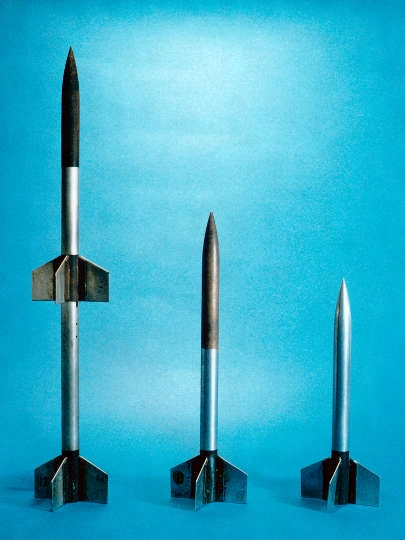
ペンシルロケット

ペンシルロケットの最初の発射実験

K-6型ロケット

L-4Sロケット
人工衛星「おおすみ」

H-ⅡAロケット

H-ⅡBロケット

イプシロンロケット

デルタⅣHeavy

ソユーズロケット

アリアン5ロケット
M系ロケットの系譜
N・H系ロケットの系譜

アメリカの主要ロケット
ロシア、ウクライナの主要ロケット
ヨーロッパの主要ロケット
中国の主要ロケット

インドの主要ロケット
密閉できるコンパクト型の小さな容器。普通、鎖やリボンに通して首飾り風に胸元に下げる。円形、長円形、菱(ひし)形、ハート形などの、薄手の金、銀その他の金属製に飾りを施し、恋人や肉親の小形写真、毛髪、細密画など、記念の品や形見の品を入れておく。感傷的な装身具としてロマンチック時代に流行し、18世紀には髪飾りに、19世紀初めにはブレスレットにもつけられた。まれにブローチもある。
[平野裕子]
出典 小学館 日本大百科全書(ニッポニカ)日本大百科全書(ニッポニカ)について 情報 | 凡例
Sponserd by ![]()
ロケット推進機関あるいはこれを備えた飛翔(ひしよう)体の呼称。ロケット推進機関はロケットエンジンあるいはロケットモーターとも呼ばれる。ロケットは自身が携行する物質を加速放出し,その反動で推進力を得ることを特徴としており,このための携行物質を推進材という。
南宋時代に書かれた《武経総要》という書物に,黒色火薬の組成と〈火薬鞭箭〉なるものの図と説明が記載されており,これをロケットの原形とする説もあるが,爆竹とみるほうが正しいようである。下って明末に著された《武備志》に見られる火箭は,より意図的に反動推進の目的に火薬を用いたものと考えられる。このような火箭の実用は,おそくとも12世紀の初めで,北宋末に金の攻撃を受けた北宋が火箭をもって防御したとの記録がある。13世紀のうちには黒色火薬の製法や反動効果をもつ火箭の技術がモンゴルからアラブを経由し十字軍遠征を通じてヨーロッパへ,あるいはもっと直接的にヨーロッパに浸透していったらしく,イギリス,ドイツ,イタリア,ギリシア,オランダ,ポーランドなどにロケットの原形の記録が残されている。ロケットということばは,語源的には糸巻竿を意味する内陸ゲルマン語のrockに小さいを示す語尾etがついたもので形状の類似に由来し,14世紀イタリアでムラトリMuratoriがロチェッタrochettaという形で用いたのが最初とされている。以後18世紀までの間,フランス,オランダ,ドイツなどヨーロッパ各地で徐々に発展を遂げ,とくにフランスは多くの戦争でロケットを用いたが,また多くの国で花火としても利用された。19世紀になるとイギリスのコングリーブWilliam Congreve(1772-1828)の作ったロケット弾がヨーロッパ各地やアメリカでの戦争に用いられ,それなりの威力を発揮したが,その後兵器としてのロケットは大砲の射程がのびるに従い見限られることとなる。
一応このように固体ロケットは10世紀にわたる歴史をもつが,一方,液体ロケットは実に19世紀もまさに終わらんとするころ,パリに留学していたペルー人ポーレP.A.Pauletが推力100kgfのロケットを実験したのがそもそもの始まりといわれる。いずれにせよ真に近代科学に裏づけされたロケット技術は,20世紀において3人の先覚者,ロシアのK.E.チオルコフスキー,アメリカのR.ゴダード,そしてドイツのH.オーベルトによって築き上げられたのである。彼らはロケット推進が本来的にもっとも宇宙飛行の手段としてふさわしいとの認識の下に,理論,実験の両面から,技術の展望を与えた。歴史的には長い間大気中の飛行に応用されてきたが,ほとんど物質の存在しない宇宙空間でこそ反動物質を携行するロケットが真価を発揮する。3人の先覚者たちはほとんど独立にこの分野での先駆的仕事を成し遂げ,地球引力からの脱出,人工衛星,惑星間飛行の可能性を示した。このための多段ロケットの発想も彼らに負うところであるし,さらに電気推進ロケット(電気ロケット)の原理もゴダードの日記(1906-12)やオーベルトの著書(1929)に記述されている。彼らがまた,液体水素-液体酸素の組合せを含む液体ロケットの将来性を予見したことも特記すべきである。しかし,近代ロケットの目覚ましい成果がナチス・ドイツの秘密兵器V2号として再び武器の姿で実現したのは歴史の皮肉である。もっとも近代的固体ロケットの発展はむしろ戦後の研究に負うところが大きい。
第2次世界大戦後は米ソを中心に宇宙探査用のロケット開発が手掛けられ,まず1957年にソ連(現ロシア)が第1号人工衛星スプートニク1号を軌道にのせて宇宙時代の幕を開いた。また69年にアメリカが成し遂げたアポロ11号による人類初の月への有人着陸計画の成功は,人類史上の快挙として特記さるべきである。81年4月には新しい宇宙輸送手段として期待されるアメリカの有人再使用型ロケットスペースシャトルが初飛行に成功し,本格的宇宙利用の時代にさらに一歩を進めた。その後アメリカ,ソ連以外にもESA(イーザ)(ヨーロッパ宇宙局),インド,中国,それに日本が自力開発のロケットで衛星打上げを行った。
日本においては第2次大戦中固体ロケットの特攻機桜花,それに迎撃機としての液体ロケット機秋水が試作されたのが,一応技術史に残る成果である。宇宙空間への輸送手段としてのロケット研究は,1955年のペンシルロケット実験に始まる東京大学のグループの活動によってその基盤が築かれた。このグループは国際地球観測年のための観測ロケット研究から固体ロケット技術を発展させ,70年には日本初の人工衛星〈おおすみ〉を打ち上げ,日本は米ソ仏に次ぎ世界第4番目の衛星打上げ国となった。この固体ロケットはその後も性能向上がはかられ,衛星打上げを含む科学観測に活躍している。一方,1967年には宇宙開発事業団が設立され,同年の宇宙開発に関する日米交換公文に基づく技術導入を軸とした液体ロケットNシリーズの開発が進められて,これによる実用衛星の打上げが行われてきており,さらに現在は液体水素-液体酸素を用いるHシリーズの開発が自主技術により進められている。
→宇宙開発 →ミサイル
〈力は運動量の時間変化率に等しい〉というニュートン力学の基本法則に従い,推進力と噴射速度の関係を説明しよう。ロケットは真空中の自由空間を飛翔しているとする。噴射された質量をも含めて考えれば,外から加わる力はないので,全体の運動量の総和は一定である。したがって,ロケット本体の運動量が推力で変わったぶんだけ,噴射された質量の逆向きの運動量が増すことになる。噴射は一方向にロケットと相対的にCという速度をもってなされるとすれば,ロケットと同じ速さで運動する慣性系からみれば,噴射される運動量は単位時間当り,
(推進材消費率)×C
だけ増加するので,ちょうどこのぶんだけ噴射方向と逆方向にロケットの運動量が変化する。言いかえればこの大きさの推力が得られるのである。
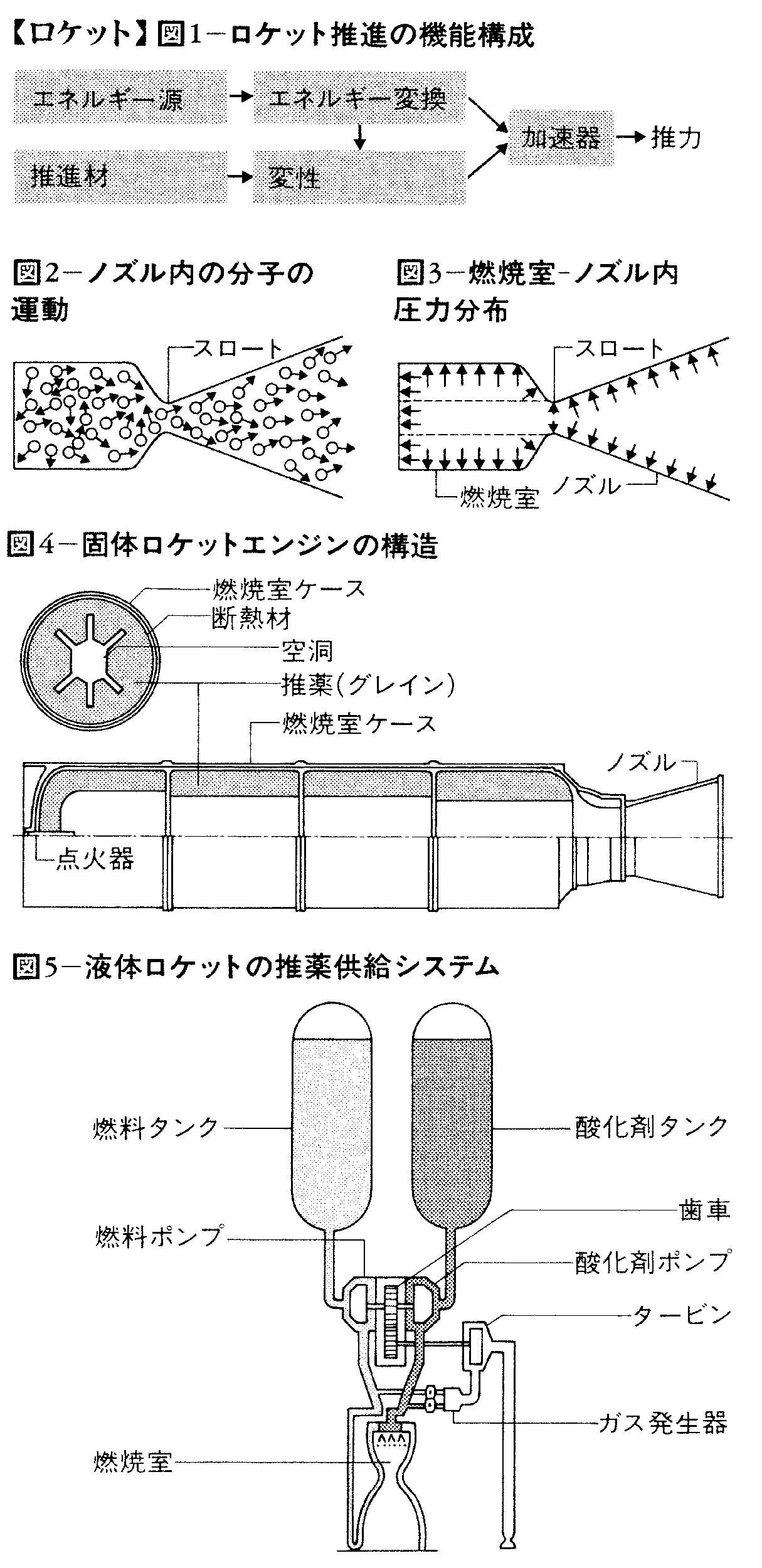
ロケット推進は推進材を加速するのにエネルギーを必要とするから,一般に図1に示したような機能要素を備えている。すなわち,一次エネルギー源も運動量の担い手としての推進材も,ともに加速に適した形態に変換や変性されるのがふつうである。
ロケットは基本特性の違いから,大きく比推力型と比出力型とに分類される。比推力型ロケットの代表例は,化学燃料を用いるふつうのロケットで,化学ロケットの名で呼ばれているものである。この種のロケットは,推進材単位質量当りに割り当てられるエネルギー量に限界があるという特質を有し,これが噴射速度あるいは比推力(推力を単位時間に消費される推進材の重量で割ったもの)に上限をもたらすという事情で性能が支配される。たとえば化学ロケットでは推進材そのもののもつ化学エネルギー,すなわち原子,分子間の結合エネルギーが加速に使われるので,当然この特質をもつ。これに対して比出力型ロケットを代表するのが電気推進である。電気推進では図1の機能がかなり明確に分離されていて,エネルギー源は推進材とは関係なく太陽光とか原子炉などから得ている。このため,エネルギーの総量は実用上際限がないとみなしてよいが,反面,単位時間当りに利用できる量,すなわち出力に限界がある。たとえば太陽光をエネルギー源とするときには,光-電気変換部の質量は出力とともに増大する。そこでエネルギー供給部単位質量当りの出力,すなわち比出力が比推力に代わって意義をもつことになる。この型では当然推進材消費率を抑えれば抑えるほど,この単位質量に与えうる速度を大きくできるので,比推力が大きくなって有利である。言いかえれば時間や加速度そのものについての制限が許す限り,低推力で用いるほうが望ましいのである。そこでこの型を別名低推力型ロケットともいう。
ここでさらにロケット推進の原理に沿って考察を進めよう。いま推進材をきわめてわずかの質量dmだけCの速度で噴射すれば,質量mのロケット本体は微小速度dvだけ増速するものとする。全体としての運動量は一定に保たれるから,
mdv+Cdm=0
の関係が成り立つ。比推力型ロケットではCは一定とみなせるから,dv=-Cdm/mを積分した関係として,質量比λ(ロケットの各段につき,推進材の使用前後の質量をmi,mfとして,λ=mi/mfで定義される)を用い,
⊿V=Clogeλ
というチオルコフスキーの関係式が得られる。この場合,推進材を使い切ることで,ロケットの速度は質量比の自然対数に噴射速度を乗じたぶんだけ増速される。一般には推進材の噴射が一方向に一定速度でなされるというわけではないので,このCは有効排出速度あるいは比推力に重力加速度を乗じたものとして解釈されるべきである。この増速分⊿Vは,ロケットの構成がきまれば定まる量であり,ロケットの能力を示す意味で特性速度と呼ばれる。一方,現実のロケットはさまざまの外力の下で飛翔するから,それらによる減速分を補う増速能力をもたせる必要があるが,軌道を選ぶという観点からは,それらを含めてロケットに要求される速度増分⊿Vを最小にすることが望ましい。チオルコフスキーの式はCが一定であれば比推力型でも比出力型でも成り立つが,軌道を選ぶという観点からは,Cを自由に選択できる比出力型に対してこの⊿Vはほとんど意味がなくなる。この場合は単位時間当りの噴射に要するエネルギーが一定という関係から,⊿Vに代わって,推力による加速度の2乗を時間で積分した量が意味をもつようになる。
さて質量比を大きくすることには,実際上構造効率が有限な値をとることからおのずと限界があり,したがって⊿Vを大きくとるのにも限度があることになる。この限界を克服するには,推進材の消費に伴って不要となる推進材容器のような構造物を逐次切り捨てることによって,等価的に質量比を向上することが考えられる。ロケットを多段(多段ロケット)として推進材を使い切った段を次々と捨ててやることは,これと同じ効果をもたらし,各段での増速分を加え合わせることで,1段では実現できない大きな速度までの加速が達成できる。ふつう,ロケットは1段当りほぼ排出速度程度,すなわち,2km/sから4km/sの程度の⊿Vが得られるので,9km/s以上の⊿Vを必要とする人工衛星打上げには,2ないし3段ロケットが使われている。
比推力型としては化学ロケットのほか,原子力ロケット,電熱ロケット,また比出力型としては静電加速型ロケット,電磁加速型ロケットが実用の域に達している。レーザー推進,核融合ロケット,光子ロケットなどはまだ概念段階である。以下では化学ロケットの代表として固体ロケット,液体ロケットについてやや立ち入った説明を加える。なお,酸化剤か燃料のいずれかを固体とし,他方を液体とするハイブリッドロケットも飛翔実績はあるが,実用例は乏しい。
各論を述べる前に,化学ロケットにおいて重要な役割を果たすノズルで,どのように推力が発生するかを見てみよう。まず内部を流れる燃焼ガスの分子の運動が,ノズルを流れるに従って変化するようすを図2に示す。ノズルの最狭部をスロートというが,ここまでの流れは音速より遅い流れであり,上流はもちろん横の壁からの影響も直ちに分子の衝突を通じてその断面全体に伝わるので,流れを狭めることであたかも絞り出される形で流速を高めることができる。しかし,流れが音速になると,分子の熱運動の速度がほぼ音速に等しくなるため,下流の影響が上流に伝わらなくなる。このため壁を絞るとここへ次から次へと分子が衝突して行き場をふさぎ,流れを減速してしまう。逆に流路を広げれば流れが膨張し,加速していく。スロート部で流れが音速になるようにし,これより下流では分子の運動方向がそろうように,末広がりの壁で膨張してくる分子を反射して,ガスを超音速にしているのである。
ところで,推力は,結局はロケットの壁面への圧力という形で発生する。図3は壁面の圧力分布を直観的に示したもので,矢印の長さが圧力の大きさを表している。ロケットが真空中を飛ぶとすれば,外側は圧力が0と考えてよい。また図3から明らかなように,スロートより前方では軸方向以外の圧力はつりあって,推力には寄与せず,推力となるのは,スロートの面積を前方に投影した部分に働く圧力である。このほかスロートより下流部分の壁に働く圧力も,前向きの合力をもつため推力に寄与する。なお,スロートより上流側についても,流れがあるため前端の圧力より下がるので,前向きの合力として若干の推力を発生する。全推力が燃焼室圧力とスロート面積との積の何倍になるかという数値は,ノズルの性能を表す意味をもち,これを推力係数という。推力係数は1.4~1.8くらいの値である。
固体の推薬を用いるロケットを固体ロケットといい,そのロケットエンジンは図4に見られるように,燃焼室,推薬,ノズル,点火器,断熱材などよりなる。推薬のかたまりをグレインという。推薬は,露出している面に点火すると面が平行移動する形で一定の速さで燃焼が進行する。図4に示したエンジンではグレインは内面から外に向かって燃えるように作られており,中心部が空洞になっている。燃焼した高温ガスはこの空洞を通りノズルより噴射される。燃焼中の推薬内部はほとんど温度上昇がないから,このような内面燃焼型では,燃焼室はごく燃焼の末期だけ高温ガスからの熱を遮へいすればすみ,高張力材料を用いた軽量化が容易である。このため,ほとんどの実用ロケットエンジン設計では,基本的にこの型を採用している。固体ロケットエンジンは推薬の燃焼特性から,初期の燃焼面形状が時間と推力の関係をきめてしまう。図4に示したグレインの開孔形状は,燃焼中ほぼ一定の推力が出せるように設計されている。固体ロケットエンジンのノズル内面には多くの場合断熱材として耐熱性のFRP(強化プラスチック)がはられている。このFRPは表面から炭化し徐々に損耗していくが,内部にはほとんど熱を伝えないので,十分断熱の目的が達せられる。この方式の断熱法をアブレーション断熱法という。もっとも,寸法変化をきらうスロート部にはグラファイトを用いることが多い。
固体ロケットエンジンの推力方向制御(TVC。thrust vector controlの略)の代表的方式には2種類のものがある。一つはノズルの開口部側壁から内側に向けて液体を噴射し,内部を流れるガスの方向を変える方法,もう一つはより直接的にノズル自体を振り動かす方法である。
固体ロケットはふつう図4に示すように前端部に点火器をおき,これから放出される火炎で点火される。点火器の内部は点火用の火薬が装てんされ,微細な電熱線に通電することで最初の熱源が作られ,しだいに大きな火炎が形成されるようなしくみとなっている。
液体ロケットでは液体の推薬(燃料と酸化剤)が用いられる。この推薬を燃焼室に送り込む方式には,加圧供給式とターボポンプ供給式がある。前者ではタンク圧力を燃焼室圧力よりも高く保ち,直接酸化剤と燃料を燃焼室に噴出し,ここで混合燃焼させる。構造が単純なので常温推薬を用いた小~中型の液体ロケットに適している。
図5は大型ロケットでもっともふつうにみられるターボポンプ供給システムである。推薬はポンプで燃焼室に圧送されるので,タンク自体はほとんど加圧する必要がなく,そのため機体をきわめて軽く作ることができる。多くの場合,推薬の一部をガス発生器で燃焼させ,その発生ガスでタービンを回転させて得られる動力でポンプを駆動する。ポンプを出た後の推薬は燃焼室内に噴射されるが,ふつう,燃料はその間二重壁で作られた燃焼室の器壁の間を通ってこれを冷却し,長秒時の運転に対しても適度な壁温が保てるように設計されている。この方式の冷却法を再生冷却法といい,エネルギーの損失がほとんどないのも長所である。液体ロケットエンジンはふつうジンバル(互いに直交する二つの回転軸をもつ台)上にすえつけられ,全体を油圧で動かして推力方向を制御する。
液体ロケットの起動や運転は固体ロケットより複雑で,しかも方式の違いによる差異も著しい。図5に示すような典型例では,ポンプ出口圧力が上がらないとガス発生器に推薬が送り込まれないことから,まずポンプの軸を強制的に外部から駆動する必要があり,このための補助的ガス発生器などをタービンスピナーという。供給系起動後はメーン弁を開き,燃焼室に推薬を導くが,これにわずかに先立って点火器に点火し噴射後直ちに燃焼が開始されるようなシーケンスが組まれる。運転中はタンク内の推薬が減ったぶんの空間を所定の圧力に保つために,ここに置換用のガスを導入することも必要である。また燃料と酸化剤をちょうどうまく使い切るためのくふうもなされねばならず,さらに飛翔時においては液面の揺動,惰性飛行時の気液混合など,注意を払うべき点が多い。
→ロケット推進剤
飛翔体としては必ずしも固体ロケットと液体ロケットに画然と区別されるわけではなく,両者を組み合わせた多段構成も例が多い。固体ロケット,液体ロケットの特徴をあげれば,固体ロケットは,(1)構造,取扱いが簡単,(2)推薬の密度が高い,(3)開発費が少ない,(4)大推力を出しやすいという長所があり,とくに(4)の長所を生かして打上げ時加速度を大きくとれるのは飛翔性能上の利点となる。一方,液体ロケットは,(1)比推力の大きい推薬が得やすい,(2)推力の大きさ制御が容易である,(3)推薬の価格が安い,(4)大型の機体を軽く作れる,などが長所としてあげられる。一般に液体ロケットは,エンジン開発に多額の費用と年月を要し,高価でもあるので,上記(3)(4)の長所を生かし,推力のわりに多量の推薬を搭載する。このため打上げ時の加速度は相当に低い。
固体,液体ロケットともに段間の分離機構や開頭機構など火工品で作動する構造要素を備えている。搭載される機器としては,観測や実利用を目的としたいわゆるミッション機器のほかに,飛翔のために必要なテレメーター送信機,レーダートランスポンダー,タイマー,点火用機器,飛翔状態監視用の計測器(加速度計,振動計,温度計,圧力計など),電源,誘導制御に必要なジャイロなどの慣性機器,計算機などが代表的である。
ロケットの打上げのためには,打上げ地点が人家から離れていることに加え,発射後の安全も考慮して発射場を選定し,必要な施設を整備する必要がある。このような支援施設としては発射台,整備塔,ロケット組立室,推進材供給設備,発射管制室,テレメーター,コマンド,レーダー地上局,光学観測所などがあげられる。テレメーター地上局では飛翔中のロケットから電波にのせて変調して送られてくる飛翔データや観測データを受信し,復調,記録する。レーダー地上局ではロケットの軌道を追尾表示する。必要に応じコマンド(指令)電波が地上よりロケットに向けて送信され,飛翔中の誘導や保安上の処置を行う。
小型の観測ロケットでは,単に空気力学的に風見安定で飛翔方向に姿勢を保ち,ほぼ予定の軌道を飛翔させるが,衛星打上げなど軌道精度を要するものでは姿勢制御装置により,打上げ後刻々にあらかじめきめられた基準姿勢をとるようになっている。しかし,多くの誤差要因や外乱のため,実際の飛翔では,予定した経路からの若干のずれは避けられない。このためより精度を改善する目的で,飛翔中の軌道実測値に基づき,この基準姿勢を修正したり,推力停止時期あるいは点火時期を変更したりする。これらの修正機能を誘導という。この実測と修正量の計算を主として地上のレーダーとコンピューターで行い,電波指令を通じて実行させる方式を電波誘導方式,機上の加速度計やジャイロとコンピューターによりすべて機上において実行してしまうのを慣性誘導方式と呼んでいる。
なお,ロケット打上げ時の全質量の,最終段搭載機器質量に対する倍率をグロースファクターといい,低高度に人工衛星を打ち上げる場合,固体ロケットで約100,液体ロケットで150~200程度の値となる。
→ロケット発射場
執筆者:秋葉 鐐二郎
出典 株式会社平凡社「改訂新版 世界大百科事典」改訂新版 世界大百科事典について 情報
Sponserd by ![]()
出典 株式会社平凡社百科事典マイペディアについて 情報
Sponserd by ![]()
出典 ブリタニカ国際大百科事典 小項目事典ブリタニカ国際大百科事典 小項目事典について 情報
Sponserd by ![]()
Sponserd by ![]()
…18世紀にはダイヤモンドを多面体にみがく技術が発達し,小粒のダイヤをちりばめた首飾が流行の主流になった。 首飾の種類には,鎖状のものや玉をたくさんつないで長く垂れ下げる形式のロングネックレス(この中には2mもの長いものを適当に巻きつけるロープネックレスも含まれる),首にぴったり巻くような形式のチョーカー,幅広の涎掛状のビブ,長めの鎖に飾りを下げるペンダント,それに写真や小物を入れるいれものを取り付けたロケットなどがある。【鍵谷 明子】。…
※「ロケット」について言及している用語解説の一部を掲載しています。
出典|株式会社平凡社「世界大百科事典(旧版)」
Sponserd by ![]()
短い夜。夜明けの早い夏の夜。たんや。《季 夏》「―や毛むしの上に露の玉/蕪村」...