デジタル大辞泉 「人工衛星」の意味・読み・例文・類語
Sponserd by ![]()
Sponserd by ![]()
出典 精選版 日本国語大辞典精選版 日本国語大辞典について 情報 | 凡例
Sponserd by ![]()
地球の引力とつり合う遠心力を生ずるような速度で地球を周回する人工物体。人工衛星の軌道は、地球中心を軌道面に含む円または楕円(だえん)となる。人工衛星に作用する遠心力(慣性力)と、人工衛星が地球から受ける引力がバランスする運動方程式により、人工衛星となるのに必要な速度は、たとえば高度500キロメートルの地球周回円軌道の場合は秒速約7.9キロメートルとなる。これを第一宇宙速度という。人工衛星が地球を周回する速度は軌道高度によって変わり、軌道高度が高くなるほど周期が長くなり、速度は遅くなる。静止気象衛星「ひまわり」は3万6000キロメートルの高度で軌道速度は秒速約3キロメートルである。
一方、地球周回軌道から離脱して太陽系惑星などを探査する人工衛星は、「探査機」として地球を周回する人工衛星と区別する。地球の引力圏を抜けるためには、第一宇宙速度の 倍(秒速11.2キロメートル)が必要で、これを第二宇宙速度という。
倍(秒速11.2キロメートル)が必要で、これを第二宇宙速度という。
[森山 隆 2017年1月19日]
ロケットを用いて人工衛星を打ち上げることが可能であるという宇宙航行の理論は、ロシアのコンスタンチン・ツィオルコフスキーの研究が代表的である。ロケットの父といわれるアメリカのロバート・ゴダードは、1926年に世界初の液体推薬ロケットの実験を行った。ドイツのフォン・ブラウンは1942年に液体燃料のV2ロケットを完成させた。日本では1955年(昭和30)に糸川英夫がペンシル・ロケットの水平発射実験を行っている。人工衛星の歴史は宇宙への輸送手段であるロケットの開発によって開かれた。
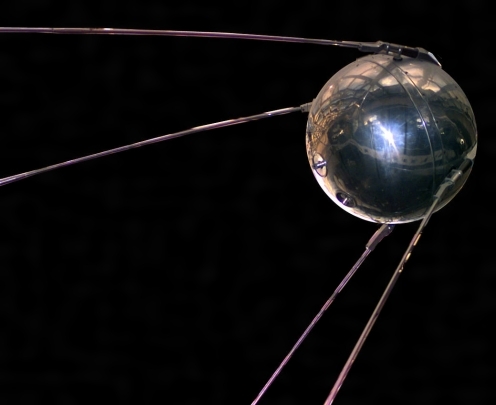
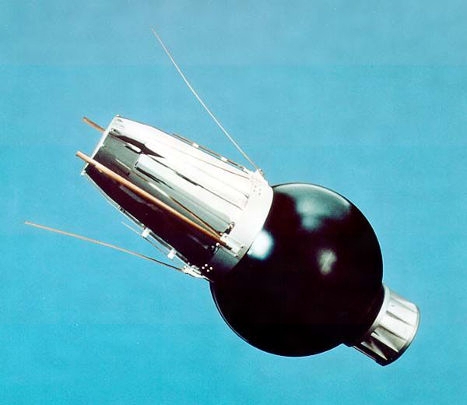
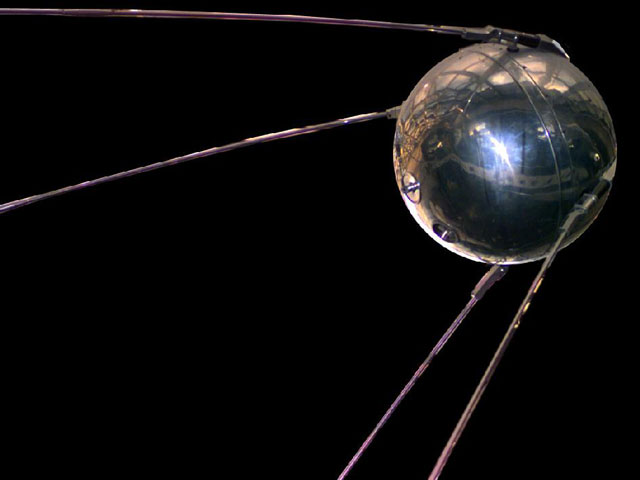
世界初の人工衛星スプートニク1号を1957年に打ち上げたソ連は、同年スプートニク2号でライカ犬を宇宙に送った。1961年にはガガーリンが世界初の有人宇宙飛行(地球を89分で周回し、打上げ後108分で地球に帰還)を成功させた。ソ連におくれをとったアメリカは、1958年に初の人工衛星エクスプローラ1号を成功させ、1962年にはアトラスロケットでグレンJohn H. Glenn(1921―2016)宇宙飛行士を乗せた初の人工衛星フレンドシップ7号を成功させた。日本は1970年(昭和45)にラムダロケットで初の人工衛星「おおすみ」(約24キログラム)を打ち上げた。中国は1964年ころから「長征1号」ロケットの開発を進め、1970年には中国初の人工衛星「東方紅1号」の打上げに成功した。インドは1979年に初の国産打上げロケット「SLV3」を打ち上げたが失敗、翌1980年に衛星の打上げに成功している。ヨーロッパにおいては、イギリスが中心となってヨーロッパロケット開発機構(ELDO:European Launcher Development Organization)を1962年に設立。「ヨーロッパ1号」は1964年に打上げが成功したが、その後は失敗が続き、ESA(ヨーロッパ宇宙機関)に改組して現在の主力ロケットであるアリアンシリーズへとつながった。
今日では、地球周回や月・惑星探査、有人宇宙飛行など大型の人工衛星や探査機の打上げが可能な大型ロケットが民間企業も含めて開発されている。一方で人工衛星は、2000年ころを境に小型化(500キログラム以下)、超小型化(100キログラム以下)の開発利用が活発化した。大学やベンチャー企業による人工衛星の独自開発、新たな宇宙利用サービスが始まっている。
[森山 隆 2017年1月19日]
人工衛星の運動についての力学的考察は、当初はその質量中心が宇宙空間の中でどのような運動をするかを解析する軌道力学を取り扱うのみでよかった。ところが衛星機能の高度化に伴い、衛星本体や搭載センサーを高精度で所定の方向に向け、精密な軌道の保持や軌道変換などを行う必要がでてきた。そのため、衛星の質量中心の周りの回転を解析する姿勢力学も重要な位置を占めるようになった。
地球を周回する人工衛星の公転運動は、太陽を周回する惑星と類似のものである。ドイツの天文学者ヨハネス・ケプラーは、デンマークの天文学者ティコ・ブラーエの観測記録から太陽に対する火星の運動を推定し、定式化した。それに準じると以下のようになる。
第一法則(楕円軌道の法則) 人工衛星は地球の質量中心を一つの焦点とする楕円(だえん)(円を含む)上を運行する。
第二法則(面積速度一定の法則) 地球の質量中心と人工衛星とを結ぶ動径が単位時間に走査する面積は一定である。
第三法則(調和の法則) 衛星の公転周期の2乗は、軌道長半径の3乗に比例する。
このような法則に基づいて運動する人工衛星の軌道は、ケプラーの六要素で次のように表される。
(1)軌道長半径 楕円の長軸の半分の長さとして定義され、楕円軌道の大きさを与える。
(2)軌道離心率 楕円軌道の形を定める。
(3)軌道傾斜角 人工衛星の軌道が乗っている平面(軌道面)が地球の赤道面となす角度。
(4)昇交点赤経 人工衛星の軌道が地球の赤道面を南側から北側に貫く点を昇交点とよび、地球の中心からみて春分点方向と昇交点方向の間の角を昇交点赤経という。軌道傾斜角と昇交点赤経を与えることによって、慣性空間における軌道面の位置が定まる。
(5)近地点引数(ひきすう) 人工衛星の軌道上で地球にもっとも近づく点を近地点、もっとも遠ざかる点を遠地点という。軌道面上における楕円の向きを定義するために、昇交点方向と近地点方向とのなす角を用い、これを近地点引数という。
(6)近地点通過時刻 任意の時刻における人工衛星の軌道上における位置を計算可能とするために、人工衛星が近地点を通過する時刻を与える。
これら六つの量が与えられると、将来にわたる任意の時刻において、人工衛星が軌道上のどこに位置して、どのような速度をもって運動しているかを計算することが可能である。これらの六要素の値は、第一近似としてはつねに同じ値を保ち、人工衛星は同一の軌道上を運行し続ける。実際には地球の自転による扁平(へんぺい)、月や太陽の及ぼす引力、地球大気による抵抗力などの影響を受けて軌道の状態は変化する。この現象を軌道の摂動という。
[森山 隆 2017年1月19日]
慣性座標系における3次元での衛星の姿勢を把握することは、観測機器の観測対象への指向、通信アンテナの指向、軌道制御時の推進方向の保持などのために必要である。姿勢を検出するセンサーは地球、太陽、恒星などをみて人工衛星との相対的な位置関係(角度)を検出する。このうち恒星センサー(スタートラッカー)は、高精度の姿勢検出には不可欠なセンサーである。恒星センサーは衛星の3軸方向に1台ずつ搭載し、それぞれが同時に複数個の星を観測し、スターカタログのなかの星と対応づける同定処理を行う。スターセンサーで撮像された星の座標系は、衛星構体の座標系に変換される。スターカタログで慣性座標系における星の方位がわかるので、慣性座標系における衛星の姿勢を推定することができる。
人工衛星の姿勢を安定させるには,ジャイロが必要である。高精度なジャイロには機械式のもの(回転するコマのようなもの)が使われてきたが、可動部の信頼性やその発生する微小振動が観測データに悪影響を及ぼしたりすることがあるため、光ファイバー・ジャイロやリング・レーザー・ジャイロなどの非機械式ジャイロが多く使われる。
実際に人工衛星の姿勢を変える姿勢制御には次のような方式と特徴がある。
(1)スピン安定方式 おもな姿勢制御を1軸方向で衛星を回転させることで、ジャイロ効果(ジャイロ剛性)により軸安定を得る方式である。制御方式ではもっとも単純であり、気象衛星「ひまわり」は5号機までこの方式であった。
(2)3軸安定方式 直交する三つの軸に対して安定させる方式である。3軸安定方式でもバイアス・モーメンタム方式は、1軸方向のみ大きなモーメンタム・ホイールを内蔵して高速回転させることで、衛星全体を回転させることなく1軸でのジャイロ剛性を得る。この方式では残る2軸、または3軸すべては別の姿勢制御が必要になる。ゼロ・モーメンタム方式は3軸、または冗長性を得るために4軸方向のリアクション・ホイールを内蔵することで、姿勢制御を行う。気象衛星や地球観測衛星は3軸安定方式をとっている。
[森山 隆 2017年1月19日]
人工衛星の軌道は厳密にはケプラーの軌道六要素で表される。一方、軌道の特徴から利用面を考察するには、軌道高度による分類(低軌道、高軌道など)、軌道傾斜角による分類(極軌道、傾斜軌道など)、形状(離心率)による分類(円軌道、楕円軌道など)、周期性による分類(回帰軌道、準回帰軌道など)で考えるのが便利である。軌道高度では、500キロメートルから1000キロメートル程度の地球周回軌道は科学観測や地球観測に使われる。3万6000キロメートルの軌道は静止軌道といわれ、地球自転と同じ速度で周回することから、気象衛星のようにつねに同じ範囲を繰り返し観測するのに適している。軌道傾斜角では、南北両極を通る太陽同期極軌道は、周回する衛星が同一地点を同一時刻(同じ太陽高度角)で観測できる。また、傾斜角を低くすることで、異なる時間帯での日周変化の計測ができる。離心率は軌道の形を決めるもので、通信などに使われるモルニア軌道は楕円軌道である。軌道の周期性については、繰り返し観測が必要な地球観測では、何日で回帰させるかに応じて軌道周期を決定する。
人工衛星を打上げ射場から3段式ロケットで打ち上げ、所定の軌道に投入するまでの過程を、静止気象衛星を例にとって以下に解説する。3段式の打上げロケットは、まず第1段ロケットと、打上げ時の推力を増強する補助ブースターにほぼ同時に点火される。ロケットは垂直に上昇をはじめ、プログラムされた飛行経路に沿って飛行方向を徐々に変え、第1段は数分後に燃え尽きて分離される。第2段ロケットに点火後さらに加速され、高度200キロメートル程度まで上昇する。その後、衛星を格納しているロケットのカバー(ノーズフェアリング)を分離し、第2段ロケットに点火して遷移軌道(トランスファー軌道といわれ、近地点高度200キロメートル、遠地点高度約3万6000キロメートル)に投入され、衛星が分離される。打上げから衛星分離までに要する時間は、約25分である。その後、2週間ほどかけて静止軌道に移行する。
[森山 隆 2017年1月19日]
人工衛星はミッション機器とバス機器から構成される。ミッション機器は科学観測や地球観測ではセンサー類を、通信衛星や放送衛星では通信中継器をさす。センサー類では紫外線、可視光、赤外線などを検知するもの、マイクロ波放射をアンテナで受信するもの、マイクロ波パルスを照射して反射波から情報を得るもの、X線やγ(ガンマ)線を検知する比例計数管などがある。通信中継器では、地上から発射された電波を受信し、周波数変換により大電力増幅してふたたび地上に送信するためのトランスポンダーなどがある。
これに対してバス機器は、ミッションにかかわらずかならず人工衛星に必要な共通的な基本機器をさす。バス機器には構体系、電源系、熱制御系、推進系、姿勢・軌道制御系、テレメトリ・コマンド(TT&C)系などがある。バス機器はミッションによって必要とされる機能・性能が異なる。構体系はロケット打上げ時の厳しい荷重、振動、加速度に耐えて衛星形状を保持し、搭載機器への負荷を抑えるために、炭素繊維強化プラスチック(CFRP)のパネル支持型やトラス構造型が使われる。電源系は太陽光を太陽電池セルで受光して、光電変換により発電する。地球周回軌道を離脱して惑星探査を行う宇宙機は、つねに太陽が捕捉できないため、小型の原子力電池(プルトニウムやポロニウムなどのα(アルファ)崩壊を起こす核種が使われる)を搭載する。太陽電池パドルは多数の太陽電池セル(シリコンやガリウムヒ素)を板状の展開パネルに貼り付けたもので、大型では10キロワットもの発電能力を有するものもある。太陽電池パドルは宇宙放射線(重粒子やγ線)や厳しい温度サイクルにさらされるため(地球周回衛星ではマイナス80℃~80℃の温度サイクルに年間5000回程度)、厳しい環境試験に合格しなければならない。太陽電池で発電された電気はバッテリーに蓄電される。衛星搭載用のバッテリーは大容量で放電深度が大きく、かつ軽量であることが必要である。最初に実用化されたのはニッケルカドミウム電池で、その後ニッケル水素、リチウムイオンと進化して高エネルギー密度化、長寿命化が進められてきた。
人工衛星がおかれる熱環境に対して、輻射(ふくしゃ)または伝導で熱を移動させて搭載機器を許容温度内に維持するのが熱制御系である。熱制御系には多層断熱材のように材料の特性で熱の出入りを調節するものと、ヒーター、サーマルルーバー、ヒートパイプのように能動的に作動して熱収支を調節するものがある。これらは通常、組み合わせて使われることが多い。
推進系は人工衛星の姿勢制御や軌道変換などで重要な機器である。個体式(火薬)、液体式(ヒドラジン)、電気式(イオンエンジン)などがある。人工衛星のミッションによって、特定のターゲットに観測センサーを向ける際など、衛星本体の姿勢を推進系により精密に制御する。また、人工衛星の軌道を変更する際にも推進系を使用する。人工衛星は摂動(大気抵抗や太陽輻射圧など)の影響をつねに受けて姿勢が変動するため、推進系による制御が不可欠である。
姿勢・軌道制御系は衛星3軸方向の向きを制御するもので、観測機器や通信用アンテナの指向、軌道制御時の推進方向の精密保持などに使われる。制御のための姿勢情報は、姿勢決定センサー(地球センサー、太陽センサー、恒星センサー、磁気センサーなど)を用いる。これらによって衛星の姿勢を推定し、次にどのように姿勢を変えるかを決定して、制御プログラムによって制御量を決定し、推進系を駆動させて姿勢を変える。
TT&C系は地上局と衛星との間の通信をつかさどるもので、衛星搭載機器の状態に関する各種情報を伝送するテレメトリー機能、衛星や搭載機器を制御するコマンド機能、衛星までの距離を測定するトラッキング機能がある。
[森山 隆 2017年1月19日]
『茂原正道著『宇宙工学入門――衛星とロケットの誘導・制御』(1994・培風館)』▽『宇宙開発事業団監修、小林繁夫著『宇宙工学概論』(2001・丸善)』▽『茂原正道・鳥山芳夫編『衛星設計入門』(2002・培風館)』▽『宇宙航空研究開発機構監修、岩崎信夫・的川泰宣著『図説 宇宙工学』(2010・日経印刷)』▽『中西貴之著『宇宙と地球を視る人工衛星100』(2010・ソフトバンククリエイテイブ)』▽『宮崎康行著『人工衛星をつくる』(2011・オーム社)』
出典 小学館 日本大百科全書(ニッポニカ)日本大百科全書(ニッポニカ)について 情報 | 凡例
Sponserd by ![]()
広義には惑星,主として地球のまわりを周回する人工の物体を指す。通常はそれらの中でも具体的な目的をもつものを指し,使用ずみロケットおよびそれらの破片などは浮遊物として区別する。
人工衛星の原理的な構想は,19世紀後半にまでさかのぼり,ロシアのK.E.チオルコフスキーがロケットを使用して宇宙船を打ち上げるという構想を発表したことに始まる。その後20世紀に入ってからも,H.オーベルト,R.ゴダードらによる研究が行われたが,第2次世界大戦中に,W.vonブラウンがV2ロケットを開発するに至り,打上げ手段の点で急速に実現に近づいた。1950年代に入ると,米ソは競って人工衛星打上げを目ざしたが,57年10月4日,ソ連(現ロシア)が世界初の人工衛星スプートニク1を軌道に乗せることに成功した。宇宙開発の歴史は,国際地球観測年の歴史でもあり,スプートニク成功の直前の57年7月以来今日に至るまで,これに基づいた宇宙科学観測が継続されており,日本の宇宙開発の第一歩もこれによっている。
60年代に入ると直ちに人工衛星の実用的利用も模索され始めた。アメリカは60年の4,5月の2ヵ月間に,初の気象衛星(タイロス1),航行衛星(トランシット1B),偵察衛星(ミダス2)を相次いで打ち上げた。これらの型式は今日もなお実用衛星の基本となっているものである。
その後の宇宙開発の中心は,有人宇宙飛行に移り,60年NASAが人間を月に送るというアポロ計画を発表して以来約10年の間,米ソの有人衛星打上げ競争の時代を迎えることとなる。61年にはソ連が世界最初の有人人工衛星ボストーク1を打ち上げ,人間の宇宙空間への進出の第一歩をしるした。人工衛星の実用もこのころから本格化し,62年には,初の商業用通信衛星であるテルスター1が打ち上げられ,テレビ中継にも成功して,宇宙開発が実生活と密着したものとなりつつあったし,64年には,初の静止衛星シンコム3も打ち上げられている。日本でも1960年代初めには,多段式ロケットの打上げに成功し,人工衛星打上げ技術を整えつつあった。そして,70年,日本最初の人工衛星〈おおすみ〉が東大宇宙航空研究所の手で打ち上げられ,日本の宇宙開発もようやく本格的な時代を迎えたのである。
70年代に入ると米ソは大型有人宇宙船であるサリュート(ソ),スカイラブ(米)を打ち上げ,諸外国を大きくリードしていったが,人工衛星利用に関しては実用面,とりわけ経済的な意味からの再評価が行われ,しだいに実社会の要請に呼応するようになった。日本も80年代独自に科学衛星を打ち上げ,実用静止衛星を保有するまでに至った。また現在では,スペースシャトルの実用化に伴い,大型実用衛星の打上げもシャトル打出しが一般化しつつある。
人工衛星は,その運動域(軌道)が重力場(例えば地球)に捕捉(ほそく)されているかどうかにより,3種類の軌道が考えられる。中心重力場における単位質量当りの力学的エネルギーEは, で与えられる。ここにVは半径rにおける人工衛星の速度,Gは重力定数,Mは天体の質量である。エネルギーEが負の場合には,軌道は中心天体に捕捉され楕円となる。Eが0以上の場合には軌道はもはや周回軌道とはならず,0の場合には放物線,正の場合には双曲線軌道となる。とくにEが0となるときの速度Vを半径rにおける脱出速度といい,中心天体が地球の場合には,人工惑星となりうる最小の速度を与える。エネルギーEが負の場合,Eを,
で与えられる。ここにVは半径rにおける人工衛星の速度,Gは重力定数,Mは天体の質量である。エネルギーEが負の場合には,軌道は中心天体に捕捉され楕円となる。Eが0以上の場合には軌道はもはや周回軌道とはならず,0の場合には放物線,正の場合には双曲線軌道となる。とくにEが0となるときの速度Vを半径rにおける脱出速度といい,中心天体が地球の場合には,人工惑星となりうる最小の速度を与える。エネルギーEが負の場合,Eを, と等置すると,aは生成される楕円軌道の長軸の長さの1/2を与える。とくにa=rの場合には,軌道は円軌道となり,そのために必要な周回速度Vは,上の二つの式から,
と等置すると,aは生成される楕円軌道の長軸の長さの1/2を与える。とくにa=rの場合には,軌道は円軌道となり,そのために必要な周回速度Vは,上の二つの式から, で与えられることになる。これは,単位質量に働く遠心力V2/rと重力MG/r2がつり合った場合と解釈される。地表面(r≒6378km)におけるこの速度は,G=6.673×10⁻8cm3/g・s,M=5.98×1027gとして約7.9km/sである。これを第一宇宙速度という。
で与えられることになる。これは,単位質量に働く遠心力V2/rと重力MG/r2がつり合った場合と解釈される。地表面(r≒6378km)におけるこの速度は,G=6.673×10⁻8cm3/g・s,M=5.98×1027gとして約7.9km/sである。これを第一宇宙速度という。
以上のことから,地表にぶつかることなく地球を周回するには,物体に約7.9km/sの速度を与えれば十分であるが,実際には大気抵抗があるためにそのような軌道は実現できない。したがって,周回軌道は地表からおよそ200km以上のほとんど大気抵抗のない高度でしか実現できず,地表からの物体(ペイロード)輸送手段(ロケット)が必要となるのである。ちなみに高度200kmにおける第一宇宙速度は約7.79km/sである。
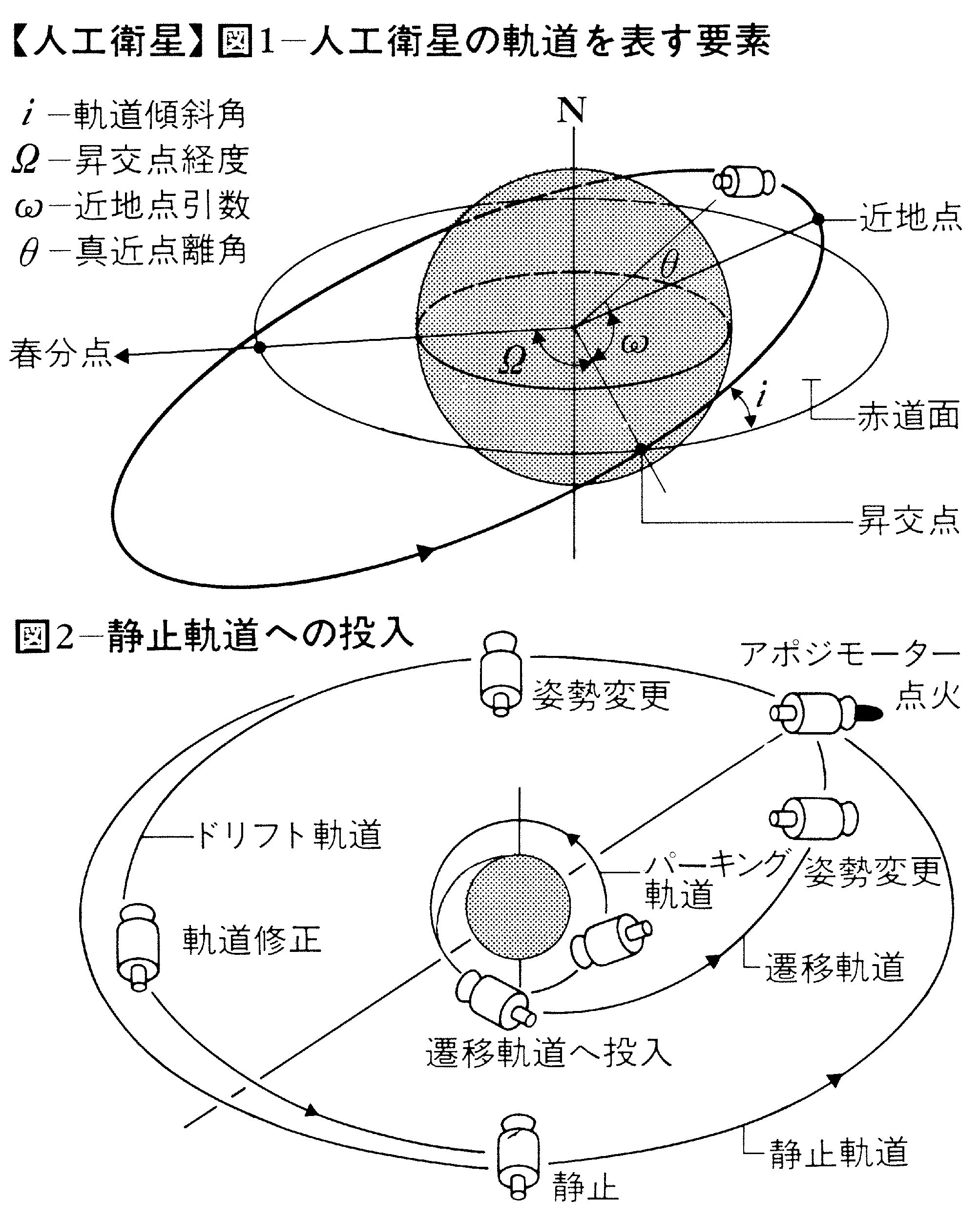
エネルギーEが負の場合には,軌道が一般に楕円となることはすでに述べたが,それは長軸および短軸の1/2をそれぞれa,bとして, で定義される離心率eで特徴づけられる。e=0は円軌道に対応する。軌道の記述には,aやeのような軌道の形を示すパラメーターだけではなく,軌道の面を示す指標として,軌道面と赤道面がなす角度を示す軌道傾斜角i,春分点から昇交点(軌道面が赤道面を南から北によぎる点)までの経度である昇交点経度Ω,昇交点から近地点までの角度を示す近地点引数ω,衛星から近地点までの角度を示す真近点離角θの四つ(合計六つ)のパラメーターが必要である。なお,通常の打上げ方式では,発射点緯度以下の軌道傾斜角をもつ軌道は達成できない。
で定義される離心率eで特徴づけられる。e=0は円軌道に対応する。軌道の記述には,aやeのような軌道の形を示すパラメーターだけではなく,軌道の面を示す指標として,軌道面と赤道面がなす角度を示す軌道傾斜角i,春分点から昇交点(軌道面が赤道面を南から北によぎる点)までの経度である昇交点経度Ω,昇交点から近地点までの角度を示す近地点引数ω,衛星から近地点までの角度を示す真近点離角θの四つ(合計六つ)のパラメーターが必要である。なお,通常の打上げ方式では,発射点緯度以下の軌道傾斜角をもつ軌道は達成できない。
楕円軌道(円軌道を含む)の軌道周期Tは, で与えられ,第一宇宙速度に対応するこの周期は約84分である。とくに周期Tが1日の円軌道を地球同期軌道geosynchronous orbitといい,その中で,軌道傾斜角0度の軌道を通常,静止軌道と呼んでいる。
で与えられ,第一宇宙速度に対応するこの周期は約84分である。とくに周期Tが1日の円軌道を地球同期軌道geosynchronous orbitといい,その中で,軌道傾斜角0度の軌道を通常,静止軌道と呼んでいる。
人工衛星の軌道はこのように,その形状から,円軌道,(長)楕円軌道,放物線軌道,双曲線軌道に分類されるほか,軌道の高度や周期により,低高度軌道,静止軌道などと呼ばれることもある。なお,軌道傾斜角が90度の軌道は極軌道polar orbitという。
人工衛星の軌道は,完全真球中心力場,完全真空中では慣性系に固定されるが,実際には,さまざまの影響によりしだいに変化していく。とくに低高度軌道においては,大気の抵抗が人工衛星の寿命を決定する。前面投影面積10m2,質量1000kgの人工衛星が太陽活動中規模時にもつ寿命は,高度500km円軌道の場合には約2~3年であるのに対し,高度200km円軌道でのそれはわずかに約2~3日である。近地点高度が1000kmを超える人工衛星については,この大気による寿命はほぼ半永久と考えてよい。地球重力場は,地球の扁平さなどのために完全な球対称ではなく,人工衛星の軌道はこのためにしだいにずれていく。この変化は,軌道の形状の変化であるよりはむしろ,面や真近点離角の変化としてであり,これらは総称して摂動と呼ばれる。軌道の初期設計にあたっては,その影響を計画に応じて十分に評価することが必要である。一方,この摂動を積極的に利用することも行われている。ソ連のモルニヤ型通信衛星では,真近点離角変動がきわめて小さくなるように軌道傾斜角が選ばれている。また極軌道上にある衛星の軌道は,この摂動のために昇交点経度がしだいに移動していくが,この1日の移動量を,地球が太陽のまわりを公転する角度(ほぼ1度)に一致するように選ぶと,軌道面を太陽に同期して変化させることができる。これを太陽同期軌道sun synchronous orbitという。太陽同期軌道は地表面を幅広くスキャンするのに適しており,ランドサットなどの探査衛星に用いられる。
人工衛星の打上げには,一般に多段式ロケットが用いられる。現在の技術では,地上離陸時の全備重量に対し,低高度軌道にペイロードを投入する能力はわずかに数%以下である。軌道投入時の速度誤差は軌道形状にきわめて敏感に反応し,高度200kmの円軌道を例とした場合,投入速度の1%増により遠地点高度は約470kmへと跳ね上がってしまう。したがって打上げ時の軌道制御は主として最終投入段階に対して計画され,具体的には打出しのタイミング,姿勢制御,さらに可能ならば噴射時間制御が行われる。静止衛星投入の場合には,この低高度軌道にいったん乗せた後(この軌道をパーキング軌道parking orbitという),さらにホーマン型移行(ホーマン軌道)と呼ばれる遷移軌道transfer orbitへの投入が行われる。静止軌道への最終投入は,この遷移軌道の遠地点でアポジモーター(小型の固体ロケット)を点火することにより行われ,衛星は静止軌道にきわめて近いドリフト軌道drift orbitへ投入される。このドリフト軌道において,衛星自身のもつ小型エンジンにより軌道修正が繰り返され静止させられるのである。この最終作業には1ヵ月近くを要する場合が多い。
人工衛星は高高度を飛行するために,非常に広い地域を可視域とすることができ,このことが,今日,人工衛星が広く利用されている最大の理由で,開発初期から,通信・気象・偵察衛星が生まれたのもこのためである。最近ではこれらのほかに測地衛星,資源探査衛星をはじめ幾種もの実用衛星が利用に供されている。通信・気象衛星は静止軌道上に置かれるのがふつうであるが,他の衛星は比較的低高度の軌道に置かれる。地表面観測,探査技術は最近急速に進歩しており,リモートセンシング技術を用いた,埋蔵資源,土地利用,環境汚染,魚場調査などの広範な応用が現実のものとなっている。スペースシャトルが実用化された現在では,大型の宇宙実験室が実現しつつあり,これを用いた宇宙工場の調査も活発で,無重量状態,真空状態などの宇宙空間の産業的地盤としての有効性も模索されている。
宇宙開発も半世紀を経て,人工衛星の数は急速に増えており,衛星どうしの衝突の可能性も問題となりつつあって,異常接近の事例も二,三報告されている。また大型衛星や原子炉衛星の落下もすでに問題となっており,国際的な対策も不可欠となろう。また宇宙空間の軍事利用化も進行しつつあり,政治,外交,文化の広い面での国際協調も必要となってきている。
→宇宙開発 →宇宙飛行
執筆者:松尾 弘毅
宇宙条約(〈宇宙法〉の項目参照)によると,月その他の天体の軍事利用は包括的に禁止されたが,それ以外の宇宙空間では,大量破壊兵器の設置以外,一般的な軍事利用は禁止されていない。このため,アメリカやロシアなどの諸国は,偵察衛星などの軍事衛星を宇宙空間に打ち上げており,さらに,他国の軍事衛星に対する攻撃を目的とした衛星攻撃システムについても研究・開発が進められている。
人工衛星は,宇宙条約によれば,打ち上げられている間,当該衛星を登録した打上げ国の管轄権に属する(旗国主義)が,さらにこの打上げ国の管轄権,管理権を国際的に公認するために,人工衛星などの登録制度を整備した宇宙物体登録条約が1975年に採択されている。
今日,国連の宇宙空間平和利用委員会において,直接放送衛星と遠隔探査衛星の利用問題が継続的に審議されている。また,赤道上空の静止軌道に打ち上げられる静止衛星が,赤道に位置する国家の主権的関心を呼び起こしている。さらに,原子力衛星の安全確保や宇宙活動の結果生じた残骸物(スペース・デブリ)など,人工衛星をめぐって新たに対応が求められる問題が発生している。
執筆者:尾崎 重義
出典 株式会社平凡社「改訂新版 世界大百科事典」改訂新版 世界大百科事典について 情報
Sponserd by ![]()
出典 株式会社平凡社百科事典マイペディアについて 情報
Sponserd by ![]()
出典 ブリタニカ国際大百科事典 小項目事典ブリタニカ国際大百科事典 小項目事典について 情報
Sponserd by ![]()
出典 旺文社世界史事典 三訂版旺文社世界史事典 三訂版について 情報
Sponserd by ![]()
宇宙の天体の軌道を周回する人工物体。軍事,科学研究,商業などに利用される。初期には米ソが国家の威信をかけて開発競争をした。最初の人工衛星は,1957年にソ連が打ち上げたスプートニク1号で,有人人工衛星もソ連が61年に成功した。これに対してアメリカは61年よりアポロ計画を本格的に開始,69年にアポロ11号で人類最初の月着陸に成功した。今日では軍事衛星,通信衛星,気象衛星,各種観測衛星などさまざまな用途の衛星がある。
出典 山川出版社「山川 世界史小辞典 改訂新版」山川 世界史小辞典 改訂新版について 情報
Sponserd by ![]()
…人工衛星を目的の最終軌道(衛星軌道orbit)に投入するまでの軌道。人工衛星として半永久的に地球を周回するためには,衛星をある程度以上(通常200km以上)の高度に運搬し,さらにある速度以上(例えば高度200kmであれば約7.8km/s以上)に加速しなければならないが,この過程が打上げ軌道である。…
… しかし,英語では宇宙開発の英訳であるspace developmentが使用されることはきわめて少なく,space exploitation(宇宙利用)というのがふつうである。 宇宙開発は,本来の意味からすると人間の宇宙空間および天体の利用であるが,これまでの経過をふりかえると,そのための技術の開発,すなわち人工衛星とロケットの開発と解釈される傾向があり,一般にはとくに両者を区別することなく,人間の宇宙への進出の活動全体を宇宙開発と解釈しているようである。宇宙飛行人工衛星ロケット
【宇宙への進出】
宇宙開発が大きな課題として認識されるようになったのは,1957年に始まった国際地球観測年を契機としてであり,ここにおいて全世界的な事業として宇宙空間の観測を主とするこの分野の研究が取り上げられた。…
…宇宙環境という場合,そこに含まれる範囲は非常に広くかつ多岐にわたるが,ここでは宇宙開発に関連して,人工衛星や宇宙船が受ける環境に焦点を絞って説明する。
[人工衛星と宇宙環境]
地球を周回する人工衛星では大気の密度が重要な要素である。…
…他の惑星についても同様である。地球のまわりの人工衛星の運動の場合には,2天体(地球と人工衛星)間の距離は地球の大きさと同じくらいである。それでも,地球がほとんど球形であるために地球を質点とみなすことができる。…
…原子力を動力源とする人工衛星で,原子炉を搭載したいわゆる原子炉衛星と,放射性同位体(RI)を搭載したものとの2種類がある。原子炉衛星の場合,原子炉燃料の核分裂による熱は,液体金属を作動流体とする蒸気タービンサイクル,あるいは熱電直接変換機thermo‐electric converter(略称TEC)によって電力に変えられる。…
…人工的に打ち上げられた地球周回の衛星や他天体の孫衛星,惑星間探査機の総称。通例,地球周回の衛星は単に人工衛星といい,その他の惑星間探査機を人工天体,あるいは人工惑星artificial planetと呼ぶことが多い。地球表面においては約11.2km/s以上の速さ(第二宇宙速度)で打ち出すと,その軌道は地球周回軌道とはならず,地球を脱出する軌道となる。…
※「人工衛星」について言及している用語解説の一部を掲載しています。
出典|株式会社平凡社「世界大百科事典(旧版)」
Sponserd by ![]()
夏の暑さに体が慣れること。数日から数十日間で起こる短期暑熱順化と、数年または数世代にかけて起こる長期暑熱順化とがある。→寒冷順化[補説]近年では、冷房設備の普及にともない短期暑熱順化が起こりにくくなっ...