デジタル大辞泉 「ロボット」の意味・読み・例文・類語
ロボット(robot)
2 目的の作業・操作をコンピューターの制御で自動的に行う機械や装置。人間の姿に似るものに限らない。自動機械。「産業
3 自分の意志でなく、他人に操られて動く人間。
[補説]チェコの作家チャペックが作品中でチェコ語の働くの意のrobotaから作った造語。

Sponsored by ![]()
翻訳|robot
Sponsored by ![]()
強制労働を意味するチェコ語 robota (ロボタ)からの命名。ただし、チャペックの作品でのロボットは、機械人間ではなく、有機質の合成人間である。
出典 精選版 日本国語大辞典精選版 日本国語大辞典について 情報 | 凡例
Sponsored by ![]()
「ロボット」ということばは、20世紀になってから生まれた。それは、後述するように、チェコの作家カレル・チャペックの戯曲『R・U・R――ロッサム万能ロボット会社』(1920)のなかで初めて登場した。
辞典などでは、ロボットということばに、古くは自動人形、人造人間などといった解説をつけたものも少なくはない。それは、このことばの成立の歴史によるものであるが、今日、ロボットという場合には、自動人形などより、産業用ロボットやペットロボットをさすことのほうが多くなっている。
[雀部 晶]
1920年にロボットということばが生まれたが、人類は、はるか以前から、人にかわって動作・操作するような道具・装置をつくりだしたいという願望をもっていた。
古代ギリシア、アレキサンドリアで活躍したヘロン(1~2世紀の人)は、神殿の祭壇の前で盛んに火が焚(た)かれることに着目し、火が盛んに燃え上がると、神殿の扉が自動的に開き、火が衰えると自動的に扉が閉まるという、今日の自動扉のような機構を考案している。また、コインを所定の場所に投げ入れると「聖水」が出てくる自動販売機のようなものを考案している。18世紀には、フランスのボーカンソンが、アヒルの機能をそのままもつ機構(からくり)の再現を試みた。アヒルの姿・形はもちろんのこと、水浴びをし、ものを食べ、鳴き声をあげ、排泄(はいせつ)までするような人工アヒルを製作した。さらに多くの技術者や発明家たちが、文字を書く人形、絵を描く人形、らっぱを吹く人形など、さまざまなものを製作している。
日本でも、自動人形は古くからつくられている。よく知られたものに、江戸時代の茶運び人形がある。人形の手の上に茶碗(ちゃわん)をのせると人形は動き始め、お茶を差し出す相手のところまで行き、相手が茶碗をとると人形は停止する。相手がふたたび茶碗を人形の手の上に置くと、人形は向きを変え、元のところまで戻る仕掛けになっていた。この人形の動力源にはクジラのひげを細工したぜんまいが使われ、木製の軸や歯車で動力を伝達していた。また、人形がとんぼ返りをしながら段を降りる「段返り人形」もあり、これは人形の胴に内蔵された水銀が上下移動するようにくふうされており、それによって動く仕掛けになっている。これら、日本の自動人形については、『機巧図彙(からくりずい)』『璣訓蒙鑑草(からくりきんもうかがみぐさ)』などの書物に、その構造を含めて記載されている。
このような自動の人形や装置などは、技術者の遊びとしてつくられたり、装飾用、あるいは人々を驚かす道具としては効果的であったが、生産に直接役だつ産業用といった機構ではなかった。とはいえ、これらの自動人形、装置を考案し、製作した人たちは、そのことだけを業としている者ばかりではなかった。たとえば、ボーカンソンは、模様織のできる織機を製作している。しかし、その織機を製作するのに、自動人形などの製作技術が、どれぐらい影響を与えたかは、さだかでない。
20世紀に入ると、自動人形は、科学・技術の進歩に伴って、より精巧なものになる。そして、今日のロボットとは質的にまったく違うが、機械技術と電気技術を組み合わせて(今日のメカトロニクスとは異なる)利用するようになった。たとえば、1927年にニューヨークで開催された世界博覧会に、アメリカのウェスティングハウス社の技師ウェンズリーRoy James Wensley(1888―1963)が設計した「テレボックス」というロボットが出品された。金属製の四角張った人形で、移動はままならなかったが、人形の内部に送信・受信装置がセットされ、かかってきた電話に対し一定の応答を可能にしたものであった。1934年、サンフランシスコ、ニューヨークで開催された国際博覧会では、ウェスティングハウス社は、歩行し、話し、ウィンクをしたり、色を識別できる「ウィーリー」と名づけたロボットを出品した。それらは、人間のもつ機能をなんとか再現しようとしてはいるものの、その動作には限界があり、実用に供するような段階には達していなかった。
[雀部 晶]
今日のロボットは、コンピュータと制御工学の発達を抜きにしては考えられない。コンピュータは、第二次世界大戦中に高射砲の命中精度を高めるために盛んに研究され、制御技術は、レーダーや原子爆弾の開発が行われるなかで、より高度なものへと発達した。これらの研究から、いわゆるフィードバックを含む系のふるまい、あるいは反応・反射を数学的に記述するサイバネティックスも登場した。さらに大戦中の、無線通信技術などの発達に伴い、真空管の性能も飛躍的に向上していった。これらが、ある意味で、今日のロボット工学の礎を形づくっていった。しかし、真空管を利用したコンピュータの段階では、今日的なロボットの誕生は無理である。ロボットには、一つの作業を繰り返し行うという能力だけでなく、産業用ロボットでいえば、作業サイクルのプログラムが容易に変更できるものが求められるのである。すなわち、ロボット(機械)ごとにコンピュータが取り付けられて、1台ごとにコントロールできることが必要とされる。ロボットの頭脳というべき部分はコンピュータであり、コンピュータの技術水準がロボット技術に大きく影響を与える。以上のような理由から、真空管によるコンピュータの水準では、今日的なロボットは実現不可能だったのである。
日本のコンピュータ技術を簡単に振り返ってみると、1956年(昭和31)に真空管によって製作された。これは1700本の真空管を使ったものであるが、演算能力、演算速度にも限界があった。真空管のスペースばかりでなく、真空管の温度が上昇することによって、不安定になりデータの信頼性も低下してしまうというものであった。これらスケールの問題や、不安定な要素が解決できなければ、とてもロボットの頭脳として使える水準ではなかったのである。
真空管の弱点を克服する第一歩は、トランジスタやダイオードの登場である。トランジスタは、真空管の働きを代替することができ、熱の発生もない。真空管に比べ、非常に小型化され、信頼性も増した。1959年から1960年にかけて、日本のメーカー各社はトランジスタ、ダイオードを活用してコンピュータの開発に成功した。トランジスタの次に開発されたのは、集積回路(IC)である。集積回路は、トランジスタを、一つの基板(基板をチップとよぶ)の上にいくつも集積したもので、これによって小型化が進むとともに、設計のむずかしさはあるものの、これまでの接触不良などのトラブルが減りマイナス要因も少なくなって信頼性を高めることができた。電卓第一号機は、1964年に日本で最初に製作され、トランジスタ4000個を使用、重さは25キログラムもあったが、3年後の1967年に開発されたICによる電卓の第一号機は、4キログラムにまで軽量化することができた。こうして、IC時代の到来が叫ばれるようになったのである。
さらにチップの集積度が高められ、1970年代なかばには、一つのIC基板上に1000個以上のトランジスタの能力を搭載したICが開発され、それらをLSI(大規模集積回路)とよぶようになった。1980年代に入ると1チップ上に数十万個以上の素子能力をもつものが開発され、それらはVLSI(超大規模集積回路)と名づけられた。1チップ上の集積度を上げる研究は21世紀になっても続けられており、いまでは億を超える回路素子を集積できるようになっている。
このように、チップの集積度が高められることによって、コンピュータの演算速度は飛躍的に向上し、さらに小型化も可能にした。こうしたさまざまな発達が、ロボット技術にも大きな影響を与え、そこから、人間の「見る・聞く・触れる・嗅ぐ・味わう」といった五感に相当する機能をもつ機器、すなわちセンサー機能がロボット技術に大きなウェイトをもつようになってきたのである。こうして、ロボットが実用化され、最初に活躍していくのは、産業用ロボットとしてであった。
[雀部 晶]
産業用ロボットについては、JIS(ジス)(日本工業規格)で6種類に分類し、一定の定義を与えている。
(1)マニュアル・マニピュレーター 人間が操作するマニピュレーター。マニピュレーターというのは、人間の上肢の機能に類似した機能をもち、対象物を空間的に移動させるものをさす。すなわち、持ち上げる、手を伸ばす、つかむ、回す、ひっくり返すなどの作業である。マニュアルであるので、人間が操作をすることが前提であり、放射性物質を厚い壁を隔てて扱うマジックハンド、深海調査船などの腕などが、例としてあげられる。
(2)固定シーケンス・ロボット あらかじめ設定された順序と条件および位置に従って動作の各段階を逐次進めていくマニピュレーターで、設定情報の変更が容易でないもの。シーケンスというのは順序のことであり、固定シーケンスというのは、作業サイクルのプログラムが容易に変更できないということである。一定の仕事だけをさせればよい場合に使われる。
(3)可変シーケンス・ロボット 固定シーケンス・ロボットと違って、設定情報の変更が容易にできるもの。すなわち、作業プログラムが容易に変更でき、作業に対し、融通をきかせなければならない場合に使われる。
(4)プレイバック・ロボット あらかじめ、人間がマニピュレーターを動かして教示することにより、その作業の順序、位置およびその他の情報を記憶し、それを必要に応じて読み出すことにより、その作業を行えるマニピュレーターをもつもの。すなわち、人間がロボットの手首をもって動かすことによって、動作を素子などに記憶させ、それを再生させて働かせるものである。動作を教えることをティーチング(教示)といい、溶接ロボット、塗装ロボットなどに使われている。
(5)数値制御ロボット 順序、位置およびその他の情報を数値により指令され、作業が行えるマニピュレーターをもつもの。これは、各動作を数値化して記憶素子などに記憶させ、それを再生して動作をさせるものであり、精密機械加工などに使われている。
(6)知能ロボット 感覚機能および認識機能によって行動決定のできるロボット。つまり、センサーをもっていて、そのセンサーで作業の対象を認識し、どのような作業をすべきなのかを判断して自らを制御するロボットである。検査測定や組立てなどに使われているケースが多い。
産業用ロボットは、日本ではこのように分類されているが、世界的に共通した定義があるわけではない。単純繰り返し動作をするだけのようなものは、ロボットとみなされない国もある。
[雀部 晶]
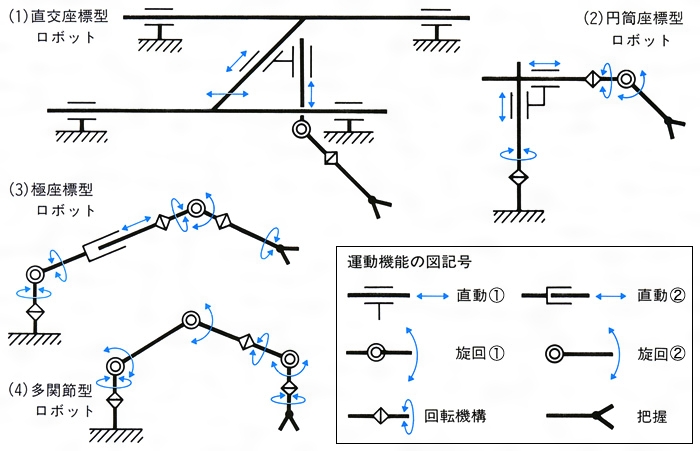
産業用ロボットの場合は、作業する部分だけをみれば、腕の動き方でも分類することができる。
(1)直交座標型ロボット 腕が上下、前後、左右にまっすぐ動くもの。垂直方向、水平方向に部分品などを差し込む作業やプラスチックの型を打ち抜く作業などに使われる。
(2)円筒座標型ロボット 直交座標型ロボットとほとんど同じ構造をしているが、前後に動くかわりに、腕全体が柱を中心に回転できるようになっている。垂直方向、水平方向に部品を差し込む作業に適しており、さらに腕の柱を中心に、円を描くように腕を動かすことができる点が特徴となっている。
(3)極座標型ロボット 円筒型座標ロボットの上下運動のかわりに、腕が付け根を支点にして、振り上げ・下げするものである。複雑な動きを可能にし、作業対象物に対して腕を下から潜り込ませるようなこともできるので、自動車工場では溶接ロボットなどに使われ重宝されている。
(4)多関節型ロボット 人間の腕が関節をもっているように、ロボットの肩、肘(ひじ)、手首にあたる部分が回転するような動きもできるものである。それぞれの関節の動きを制御することによって、曲面に沿って腕を動かしたり、作業対象物の裏側、下側にも腕をもっていって作業をすることができる。自動車の塗装作業に多く使われている。腕が自由に回転したり、伸び縮みしたりする軸が形成されているが、どれだけの動きが可能な軸が備えられているかということが「自由度」といわれるもので、一方向にしか軸がとれないのは、一自由度ということになる。
[雀部 晶]
工場の中でどのようにロボットが使われているのか、自動車工場の溶接ロボット、塗装ロボットを例に、その作業ぶりをみてみよう。
自動車工場での流れ作業は、一つの生産ラインのなかに、いろいろな車種が同時に流されて製造しているものがある。生産ラインに配置されるロボットが、もし単純繰り返しロボットであれば、同じ動作の繰り返ししかできないので、生産車種も1種にせざるをえないが、数値制御ロボットの出現によって、ロボットの動作はコンピュータの指示によって多様となり、Aという車種、次にB、そしてCの車種、またAの車種というように、生産ライン上を異なる車種が流れてきても、それに対応した作業をすることができるようになっている。
溶接については、溶接ロボットができる以前は、当然のことだが、溶接専門の溶接工がこれを行っていた。人間がやっていたとき、流れ作業のなかで自らに課せられた溶接の範囲を短時間に正確に行うことが求められたが、溶接の対象は動いており、保持する溶接機の重さもあって、たいへんつらい仕事であり、未熟練者が行う場合、正確度は落ち、製品にばらつきが出たり、極端な場合には自動車の安全性にまで問題が及ぶこともありえた。コンピュータの指示どおりに動くロボットの場合、故障が生じない限り、溶接機の重さを感じることもなく、正確な場所により早く溶接し、製品のばらつきをなくすことも可能にした。
塗装作業については、吹き付け塗装でロボットが多く使われている。その動きは、溶接ロボットと共通しているが、吹き付ける際の手首の振り方は、人間の手の動きでは不可能な動きをさせる場合もある。作業効率を向上させるために、人間の手の動作ではできない手首を一回転させるようなことが、その一例である。塗装作業は、非常に熟練を要する作業である。均一に塗装するためには、スプレー・ガンを塗装表面から一定の距離と角度でバランスよく振らなければならない。また、塗料のたれを絶対につくらないために、手首を上下左右にうまく動かし続けて作業を進めなくてはならない。このようにむずかしい作業でも、プレイバック・ロボットなどを使い、ベテランの塗装工の手法をロボットにティーチングすることによって、作業をさせることが可能になる。
自動車工場では、溶接部門、塗装部門にロボットが大量に導入されたことによって大きな合理化を可能にしたが、組立て工程は、ほとんどが人力に頼っているのが現実である。
[雀部 晶]
ロボットは産業用ばかりでなく、私たちの身近なところで活躍するロボットの誕生が期待され、すでに実現しているものもあり、また、早期開発が強く望まれるロボットも多々ある。すでに実用化されたロボットの一つに、蘇生(そせい)訓練用生体シミュレーターがある。人工呼吸、心臓マッサージなどを練習するロボットで、人体の形をしており、その内部に、圧力計や磁気による感知器などがセットされており、訓練生のやり方によって、生きたり死んだりを表示するようにまでなっている。また、医学生のためのロボットとして、脈拍や呼吸まで発生するもの、麻酔技術訓練用に血圧、呼吸音などが示されたり、注射や点滴の訓練までできるものが開発されている。
一方、実用化が強く望まれるロボットもさまざまある。身体障害者を援助するロボット、目の不自由な人の盲導犬にかわるロボット、病気で寝たきりの人を援助するロボットなど、福祉に関するロボットはその一つである。しかし、福祉関係のロボットは、あくまでも人間の介護の補助的なものであり、福祉をロボットに任せることだけでは福祉にならないことを忘れてはならない。人間のぬくもりをもったロボットは絶対にできないといっても過言ではない。
さらに、火災などに際しての人命救助、消火活動ロボットの高度化も望まれている。猛火あるいは有毒ガスの中に入っていき、火元をキャッチして正確に消火活動をしたり、逃げ遅れた人を救助するような機能を有するロボットである。
そして、1990年代に入るとヒューマノイドロボット(人間型ロボット)、ペットロボットなども注目されてきた。ヒューマノイドロボットでは、姿・形も人体にそっくりなものが追究されている。たとえば、二足歩行で人間と同じように滑らかに歩き、階段もなんなくクリアしていくロボットである。しかし、いまだ自律的に環境に対応して移動することすら、むずかしい状況である。あらかじめ環境の状況を、プログラムにインプットしておかなければ対応することができないのが現状である。ペットロボットについては、1997年(平成9)にソニーが初めて、人間の動作に反応する犬型ロボットを発表して注目された。1999年6月には、犬型ロボット「アイボ」が限定販売された。1体25万円もしたが、3000台がわずか20分で完売されたという。他のメーカーでも開発を進めているが、生物体ではない「ペット」が、人々にどこまで癒(いや)しを与え、どこまで普及するか疑問視する向きもある。しかし、このような知能型ロボットに求めるのは、癒しの効果ばかりではないだろう。これらの技術は、医療、福祉、災害救助等々に活用されることこそが期待されているのではないだろうか。
[雀部 晶]
日本において、ロボットが大きな社会的話題となったのは、1980年代に入ってからである。1982年(昭和57)正月の日本の新聞のタイトルが、その関心の高さをよく示している。そのタイトルは、「ロボット時代」「ロボット文明」「未来は始まっている――最新テクノロジー全科」「乾杯、ロボット時代」「高度技術社会を拓(ひら)く」「超への挑戦」。そしてまた、新聞各紙は、「新モダンタイムス――技術とわれら人間」「ミクロの革命――LSIが変える経済・社会」「こんにちわ、ロボット時代」「ザ・ロボット――神と悪魔の分身」「コンピュータの現場レポート」などの連載を一斉に開始した。
1980年代初めに、ロボットがこれほどまでに社会的な話題になったその背景には、次のような事情があった。すなわち、1970年代に実用化が始まった産業用ロボットによって、生産過程とそれに伴う労働配置が大きく変化していったのである。それを国民のだれしもが感じつつあったこと、いわゆる1970年代の低成長時代に、オートメーションが質的に変化し続けるとともに、それが21世紀に向けての大キャンペーンであった「技術立国」政策にも結び付いていたからである。そして、他方では、高度情報化社会の到来が喧伝(けんでん)され、情報処理機器が家庭内にまで急激に押し寄せる状況があり、なにか新しい社会、新しい生活を現出させるような気分があったことも指摘できる。
そのさなか、ロボットが日本で大きく騒がれている1982年6月、「IBM産業スパイ事件」が発覚した。この事件は、IBMの開発したコンピュータにかかわる問題と、その周辺機器に関する情報を日本の日立製作所、三菱(みつびし)電機などの社員が産業スパイしたという事件である。つまり、この事件は、日米の企業間競争の激しさ、産業スパイという問題にとどまらず、ロボットで大騒ぎをしている日本の技術水準の問題、すなわち、チップをつくる技術に優れた日本も、それを駆使するソフトウェアの面では、アメリカに比べて劣っている事実を白日の下に明らかにしたのである。こうした問題が明らかになるとともに、当時のロボットの記事、特集などには、共通した弱点もみられた。それは、ロボットによる労働災害や、ロボットの軍事利用について触れることがタブー視されていたことであった。
産業用ロボットや生活に身近なところで活躍するロボットは、ますます普及していくであろうが、これからは、これまで述べてきたような問題点、弱点をどのように克服していくかが重要である。当面、これらの課題を抱えつつも、さしあたっては、いかなるロボットであろうと安全性を徹底的に追求することを欠かしてはならない。とりわけ産業用ロボットについては、労働者の安全を軽視して、「合理化」の手段としてだけロボットを利用することは許されない。ロボットの開発、利用は、人類の生活、労働、社会が豊かになるためのものでなければならない。
[雀部 晶]
文学作品に登場する、もっとも古いロボットと思われるものは、ギリシア神話のなかの青銅の巨人タロスである。鍛冶(かじ)神ヘファイストスがつくったとされるタロスは、クレタ王ミノスの命令でクレタ島を巡回して見張りの役目を果たした。16世紀にプラハのユダヤ人ゲットーで生まれた伝説には、ユダヤ教のラビの呪文(じゅもん)により生命を得て動き出す、泥でできた巨人ゴーレムが登場する。
ドイツの作家E・T・A・ホフマンは、バレエ『コッペリア』(1870年初演)のもととなる作品『砂男(すなおとこ)』(1817)に、人造人間の美しい踊り子オリンピアを登場させた。イギリスの女流作家シェリー夫人は『フランケンシュタイン――現代のプロメテウス』(1818)のなかで、人間や動物の死体の各部分を合成してつくった肉体をもち、雷の電気によって生命を吹き込まれる怪物を創造した。
アメリカでは、廉価版週刊本の「ダイム・ノベル」の1冊として、エリスEdward Sylvester Ellis(1840―1916)の作品『大草原の蒸気人間』(1868)が出版され、好評を博した。これは蒸気機関で動くロボットが、大草原を横断し、アメリカ・インディアンと戦うといった内容の少年向け冒険小説であった。この作品に刺激されて、他の会社からは、「発明家フランク・リードと彼のつくった蒸気人間」を主人公にしたシリーズが生まれた。内部機構まで詳しく説明された機械仕掛けのロボットとして登場したごく初期の例としては、フランスのビリエ・ド・リラダンの『未来のイブ』(1886)のなかで、世界の発明王エジソンが創造したと物語られている金属製のロボット美女アダリーがあげられる。
童話の世界では、ピュグマリオニズム、つまり人形に愛情をそそぐ人々の物語の流れをくんで、イタリアのコッローディの『あるあやつり人形のおはなし』(1881)の主人公ピノッキオや、アメリカのL・フランク・バウム(ボーム)が『オズの魔法使い』(1900)に登場させた命をもったかかしや機械仕掛けのブリキのきこりなど、人造人間といえなくもない存在がたくさん登場する。
[新藤克己]
このころの作品では、ロボットを表すのに、ギリシア語の「自ら動く」を意味するautòmatosから転じた「オートマトン」という名称が広く用いられていた。1920年に書かれ、翌1921年1月にプラハで初演された戯曲『R・U・R――ロッサム万能ロボット会社』のなかで、チェコ(当時はチェコスロバキア)のカレル・チャペックは、人体構造を極限まで単純化した化学・生物学的人造人間を登場させ、この人造人間をロボットと名づけた。ロボットというのは、チェック語のrobota(強制労働)、robotik(労働者)からの合成語である。『R・U・R』は資本主義を風刺し、オートメーションの過度の発達が人間性を消滅させるのではないかという危惧(きぐ)を描いた作品として注目され、以降、人造人間を表すのにロボットという名称が広く用いられるようになった。
当時の作品に登場するロボットは、機械人形、召使い、怪物、あるいは戯画化された人間といった役どころが多く、その姿かたちも人間そっくりにつくられるのが一般的であった。『R・U・R』のロボットや、エドガー・R・バローズの『火星の合成人間』(1939)に登場する合成人間など、化学・生物学的に合成され、血と肉をもち、しかも人間の姿かたちをしたものを、とくにギリシア語のandròs(人間、男性)からの合成語である「アンドロイド」とよぶことも多かったが、現在では、本来なら「ヒューマノイド」(人間もどき)・ロボットとよばれる機械仕掛けのものを含め、人間型ロボットのすべてをアンドロイドとよぶ。
[新藤克己]
人間以上の知恵と力を備えたロボットが、人間同様の姿かたちをもち、人間社会に出てきて生活するというシチュエーションがひとたび設定されると、ロボットは、それまでの脇役から一気に主役の座に躍り出た。作家で、生化学者でもあったアシモフは、J・W・キャンベルのヒントを得て、『堂々めぐり』(1942)のなかで、ロボットの行動規範ともいうべき、「ロボット工学の三原則」を創作、以後のロボットを扱った小説に多大な影響を及ぼした。
(1)ロボットは人に危害を加えてはならない。また、人間が危害を受けるのを、なにも手を下さずに黙視していてはならない。
(2)ロボットは、人間の命令に従わなくてはならない。ただし、第一原則に反する命令はその限りではない。
(3)ロボットは、自らの存在を守らなくてはならない。ただし、それは第一、第二原則に違反しない場合に限る。
以上の三原則を駆使して、アシモフは『私はロボット』(1950)をはじめとする数々のロボットをテーマとする作品を発表した。
このようにして、文学作品に登場するロボットが人間に近づくにつれ、人間性の本質をロボットに託して問う作品が現れ始める。シマックの『ハウ‐2』(1954)といった作品では、感情を備えたロボットが裁判にかけられ、単なる機械ではなく、人格をもった存在であるとされる。また、ディックの『アンドロイドは電気羊の夢を見るか』(1968)では、人間という存在のアイデンティティが問われている。この作品はのちに『ブレードランナー』(1982)というタイトルで映画化された。アシモフも短編集『バイセンテニアル・マン』(1976)で、人間とロボットの差はどこにあるのかを考察している。この短編集に収められた作品の一つは『アンドリューNDR114』というタイトルで1999年に映画化された。バリントン・J・ベイリーBarrington J. Bayley(1937―2008)の『ロボットの魂』(1974)には、魂の意味を探し求めるロボットが登場する。アメリカの作家レスター・デル・レイLester Del Rey(1915―1993)の『愛しのヘレン』(1938)やイギリスの作家クーパーEdmund Cooper(別名エイバリーRichard Avery、1926―1982)の『アンドロイド』(1958)など、ロボットと人間の恋を描いた作品も多い。
パソコンが生まれた1970年代以降、コンピュータが人々の生活に溶け込んでくると、コンピュータとロボットを結び付けた作品も現れた。ルーディ・ラッカーRudy Rucker(1946― )は『ソフトウェア』(1982)で、ロボットたちが進化を始め、やがて自意識をもつに至る過程を描き、続編の『ウェットウェア』(1988)では、人間の遺伝子とロボットのプログラムを掛けあわせたハイブリッドな脳をもつ子どもを、人間の子宮から生み出すというアイデアを描き出した。
[新藤克己]
ロボットを描いた作品を語るうえでは、小説のみならず、数多くの漫画の存在も見逃すことができない。とくに日本においては、横井福次郎(1912―1948)の『ふしぎの国のプッチャー』(1946)に登場するペリー以来、たくさんのロボットが登場している。手塚治虫(おさむ)(1928―1989)が1951年に誕生させた、鉄腕アトム(『アトム大使』のなかで登場。翌1952年から『鉄腕アトム』のタイトルでシリーズ化)は、日本国内のみならず、世界各国で人気を博した。本来は少年向きに描かれたこの作品のなかで、手塚はロボットと人間の間に存在するさまざまなテーマを取り上げ、のちの世代に大きな影響をもたらした。ここにおいて、ペリーもアトムも、亡くなった子どもの身代わりとしてつくられたことは注目に値する。また、平井和正原作、桑田二郎(1935―2020)作画による『8マン』(1963)の主人公は、戦闘用として開発された等身大のロボットに死亡した人間の記憶を移植した存在で、生前の記憶をそっくりそのまま引き継ぎ、その人間として生活していた。これに対して鳥山明(とりやまあきら)(1955―2024)が1980年に発表した『Dr.スランプ』に登場する少女型ロボット「アラレちゃん」は、だれかの身代わりとしてではなく、作中人物のマッド・サイエンティストの気まぐれでつくられた。
アトムやエイトマンが等身大のロボットであるのに比べて、横山光輝(みつてる)(1934―2004)が1956年に発表した『鉄人28号』の主人公は、人間の何倍もの大きさをもつ巨大ロボットである。アトムが電子頭脳によって自律的に「思考」することができるのに対して、鉄人は無線操縦装置により、人間のコントロールに従って動くだけの存在であった。つまりコントローラーをもつ者によって善悪が入れ替わるのである。1972年に永井豪(ながいごう)(1945― )が生み出した『マジンガーZ』も人間が操縦する巨大ロボットであるが、鉄人のように外部のコントローラーで動かすのではなく、人間がコックピットに乗り込んで操縦するようになり、以後たくさんつくられたいわゆる「巨大ロボットもの」に影響を与えた。
漫画に登場するロボットは、人間型に限られるわけではない。『鉄腕アトム』にもさまざまな形のロボットが登場するし、『Dr.スランプ』にはたくさんの非人間型ロボットが登場する。人間型以外のロボットのなかでもっとも有名なのは、藤子・F・不二雄が1970年に誕生させた、未来の世界からきたネコ型ロボット、「ドラえもん」であろう。
[新藤克己]
19世紀末に映画が誕生して以来、ロボットは格好のテーマの一つとして取り上げられてきた。まだロボットという名称ができる前にも、「オートマトン」もしくは「メカニカル・マン」の名で、たくさんの草創期の映画に主役あるいは脇役として登場する。テア・フォン・ハルボウThea von Harbou(1888―1954)が書き、その夫フリッツ・ラングの手で映像化された『メトロポリス』(1926)に登場するロボットのマリアの姿は、リラダンの『未来のイブ』で描かれたロボット美女アダリーをモチーフに造形されており、それが1977年にジョージ・ルーカスがつくった映画『スターウォーズ』で活躍するロボットの一つ、C-3PO(シー・スリー・ピーオー)へと受け継がれている。
1954年につくられた『ゴッグ』には、狂ってしまったスーパーコンピュータが人類に立ち向かうための道具として、殺人ロボットが登場する。『禁断の惑星』(1956)に登場するロビーは、アシモフのロボット工学の三原則を忠実に守る万能ロボットで、絶大な人気を博した。マイケル・クライトンMichael Crichton(1942―2008)が脚本を担当した『ウェストワールド』(1973)では、西部開拓時代のアメリカの町が再現されたテーマパークで起こった事件が描かれる。そのテーマパークにはロボットの住人がたくさん住んでいて、観光客たちを楽しませるのである。『スターウォーズ』には、さまざまな宇宙人とともに、C-3POやR2D2(アール・トゥー・ディー・トゥー)をはじめとするたくさんのロボットが登場する。ディックの『アンドロイドは電気羊の夢を見るか』(1968)を映画化した『ブレードランナー』(1982)に登場するレプリカントとよばれる生物学的ロボットは、たった4年の命しか与えられていないため、もっと長い命を求めて人間に反逆する。『ターミネーター』(1984)には、やはり人間に反逆し、自分たちの世界をつくろうとするロボットが登場する。
日本では、漫画として発表された『鉄腕アトム』『鉄人28号』が、その後に実写やアニメーションのテレビ番組となり、劇場映画もつくられた。同様に『エイトマン』『マジンガーZ』もテレビ・アニメーション番組となったあと、劇場映画もつくられた。『マジンガーZ』以後「巨大ロボットもの」とよばれるジャンルが成立し、アニメーションや実写の作品がたくさん制作された。『機動戦士ガンダム』もその一つで、1979年にテレビ・アニメーション番組として誕生したあとで、小説化されたり劇場映画がつくられた。ガンダムがそれまでの巨大ロボットものと異なるのは、登場する人間が乗り込んで操縦する巨大ロボットが、ロボットという呼び名ではなくモビルスーツとよばれたことである。つまりこの作品から、人間が「身に着ける」巨大ロボット型の戦闘服というニュアンスが持ち込まれたのであり、その流れは士郎正宗(しろうまさむね)(1961― )の『アップルシード』(1985)や『攻殻機動隊』(1991年漫画版、1995年劇場映画版『GHOST IN THE SHELL 攻殻機動隊』)に登場するアーマードスーツに受け継がれている。
[新藤克己]
『中野栄二著『ロボット工学入門』(1983・オーム社)』▽『斎藤正彦編『ロボット社会と人間』(1985・東京大学出版会)』▽『吉川弘之著『ロボットと人間』(1985・日本放送出版協会)』▽『日本規格協会編『産業用ロボット関係JIS特集版』(1986・日本規格協会)』▽『中小企業事業団中小企業研究所編『産業用ロボットの制御方式と利用技術』(1986・日刊工業新聞社)』▽『中野豊道著『ロボットのしごと・安全の生理』(1988・築地書館)』▽『計測自動制御学会編・刊、伊藤宏司・伊藤正美著『生体とロボットにおける運動制御』(1991)』▽『三田出版会編・刊『ロボット・ルネサンス――人間とロボットは共存できるか』(1994)』▽『山藤和男著『ロボットAtoZ』(1995・オーム社)』▽『福田敏男・光岡豊一著『夢のマイクロロボット』(1995・オーム社)』▽『喜多村直編著、上條茉莉子ほか著『人間と機械の共生』(1996・コロナ社)』▽『J・L・ジョンズ、A・M・フリン著、熊切康雄訳『移動ロボット――基礎科学と応用』(1996・トッパン)』▽『早稲田大学ヒューマノイドプロジェクト編著『人間型ロボットのはなし』(1999・日刊工業新聞社)』▽『安田勝編、下嶋浩・佐藤治著『機械工学入門講座8 ロボット工学』(1999・森北出版)』▽『楠田喜宏・八木喬著『図解 産業用ロボット導入実践ガイド』(1999・日刊工業新聞社)』▽『有本卓著『ロボットにかける夢――知と身体の調和をめざして』(2000・岩波書店)』▽『伊藤宏司編著『知の創発――ロボットは知恵を獲得できるか』(2000・NTT出版)』▽『中川栄一・伊藤雅則著『ロボット工学概論』(2000・成山堂書店)』▽『日本機械学会刊・編『ここまできたアミューズメント/エンターテイメント/ペット・ロボットの現状と将来』(2000)』▽『太田順・倉林大輔・新井民夫著『知能ロボット入門――動作計画問題の解法』(2001・コロナ社)』▽『北野宏明著『大人のための徹底!ロボット学――最新テクノロジーから、ロボカップまで』(2001・PHP研究所)』▽『大阪大学創立70周年記念出版実行委員会編、白井良明・浅田稔著『身近になるロボット』(2001・大阪大学出版会)』▽『日経メカニカル・日経デザイン編『RoBolution(ロボリューション)――人型二足歩行タイプが開くロボット産業革命』(2001・日経BP社)』▽『梶原一明編『日本発 ロボット・テクノロジーが世界を変える』(2001・ビジネス社)』▽『福田敏男監修『ぼくらのともだちロボット大図鑑』(2001・PHP研究所)』▽『ハンス・モラベック著、夏目大訳『シェーキーの子どもたち――人間の知性を超えるロボット誕生はあるのか』(2001・翔泳社)』▽『厚生労働省編『産業用ロボットの安全必携――特別教育用テキスト』『産業用ロボットの安全管理――理論と実践』(2001・中央労働災害防止協会)』▽『鎌田慧著『ロボット絶望工場』(講談社文庫)』▽『瀬名秀明著『ロボット21世紀』(文春文庫)』▽『築地達郎・京都経済新聞社取材班著『ロボットだって恋をする』(中公新書)』▽『B・アッシュ編、山野浩一日本語版監修『SF百科図鑑』(1978・サンリオ)』▽『手塚プロダクション監修、池田啓晶構成・文『手塚治虫キャラクター図鑑(1)「鉄腕アトム」とロボット・変身ヒーロー編』(1998・朝日新聞社)』▽『ファ・チュン・チョン著、大野浩之監訳『インターネットエージェント――情報空間を行き交うロボットたち』(1998・インプレスコミュニケーションズ)』▽『星新一作、和田誠絵『新・名作の愛蔵版 きまぐれロボット』(1999・理論社)』▽『瀬戸龍哉・山本敦司著『巨大ロボット読本』(1999・宝島社)』▽『小林尚登著『ロボットはともだちだ!』(1999・オーム社)』▽『喜多村直著『ロボットは心を持つか――サイバー意識論序説』(2000・共立出版)』▽『『キネ旬ムック特集:スーパーロボット千年王国(ミレニアム)動画王』(2000・キネマ旬報社)』▽『野田昌宏著『図説 ロボット――野田SFコレクション』(2000・河出書房新社)』▽『手塚治虫著『ロボット傑作集(手塚治虫アンソロジー)1~2』(2001・秋田書店)』▽『カレル・チャペック著、千野栄一訳『ロボット R. U. R.』(岩波文庫)』
出典 小学館 日本大百科全書(ニッポニカ)日本大百科全書(ニッポニカ)について 情報 | 凡例
Sponsored by ![]()
現在一般にロボットという言葉は,無人装置,自動制御などと同じ意味に用いられている。産業用ロボットや深海や惑星の探査機などがそれである。歴史的には人間に近い外観をもち,機械や電動装置で人間と同じような作業ができるものをさしていた。漫画やアニメーション,またSFの中で活躍しているロボットがそれで,人工的につくられるので人造人間artificial man,人間に似たものであることからアンドロイド,ヒューマノイドhumanoidなどとも呼ばれる。有機体と機械を合成したサイボーグも広義のロボットといえ,さらにからくり人形(自動人形automata)の類もロボットの先駆形態と考えることができよう。ロボットという名称が初めて使われたのは,K.チャペックの戯曲《R.U.R.(エルウーエル)》(1920)においてである。これはチェコ語で〈強制労働〉を意味する語ロボタrobotaからきたもので,その点では現代の工業用ロボットの感覚に近い。ただし,この作品に登場するロボットは,機械人間ではなく,有機質の合成人間である。
最古のロボットといえるのは,ギリシア神話の名匠ダイダロス,あるいは鍛冶神ヘファイストスの手になると伝えられる青銅の怪物タロスであろう。くだって中世にはユダヤ伝説の巨人ゴーレムが登場する。ただし前者の活力源は牡牛の血液であり,後者も魔法で動く泥人形にすぎなかった。中世以降には錬金術師がレトルトの中で合成するという矮人ホムンクルスの伝説も流布した。またR.ベーコンは〈青銅の頭〉と呼ばれる人工の頭部をつくり予言を行わせたという。機械じかけの人形を製作することは,それ以降近世にかけて特に盛んに行われるようになり,近代的ロボットの前史を形成した。これに加え,みずからも自動人形を所有したデカルトの出現とともに,人間の身体生理機構を一種の機械とみる考え方がフランスを中心に広まり,ラ・メトリー《人間機械論》(1748)などの出版をみた。人間が機械から区別される要因は,魂や理性をもつことにもとめられたが,18世紀にはこれすら機械的な本質をもつとする考え方も生じた。
これらの動向を背景に19世紀に入ると,文芸の方面でE.T.A.ホフマンの《砂男》(1816)に機械の舞姫オリンピアが登場する。また,M.シェリーの《フランケンシュタイン》(1818)の怪物は,人間や動物の死体の不細工な寄集めだが,この作品は,擬似科学的な書きぶりと,人間のつくったものが人間に反逆するというSFの基本テーマをふまえている点で,正統的なロボット文芸の始祖と目される。前出の《R.U.R.》のテーマはその延長線上にある。一風変わったところでは,ビリエ・ド・リラダンの《未来のイブ》(1886)が,機械美女アダリーを生んだエジソン(アメリカの発明王エジソンがそのモデル)の才能にことよせて科学技術の精華をひたすら詩的にうたいあげているのが興味深い。
20世紀に入って,科学技術の発展によりロボットの開発が現実的問題になりだす1940年代初頭には,I.アシモフが〈ロボット3原則〉を提示して,従来のロボットSFの抽象性と矛盾を払拭(ふつしよく)し,明快な論理をそこに据えた。この3原則は,(1)ロボットは人間に危害を加えてはならず,また人間が危害に遭うのを見のがしてもいけない,(2)ロボットは人間から与えられた命令に,それが(1)に反しない限り従わなければならない,(3)ロボットは(1),(2)に反しない限り自分の身を守らなければならない,という3条文から成る。これはいわば工業技術製品の理想像を示したもので,アシモフの《われはロボット》(1950)をはじめとする諸作は,こうして人間の良き友となったロボットの姿を映すと同時に,その3原則を踏みにじりつつ発展をとげてきた人類の科学文明の正体を暴く効果をもあげている。かつて悪魔に比せられる怪物であったロボットが,こうして人間のレベルでとらえられたわけだが,現実の工業ロボットの現状からみて,これが再び人間を超える運命にあることは明白なようだ。D.F.ジョーンズの《コロサス》(1966)では,国防用の巨大コンピューターが人類の安全のために人類を支配する。アシモフ作品でもロボットは結局人類を下から支え操る存在となることが予言される。C.D.シマック《都市》(1952)では,人間が滅びたあとの地球で,その文明遺産を守るロボットと犬が牧歌的な協同生活を営んでいる。
→からくり →人間機械論
執筆者:柴野 拓美
空想に始まったロボットは先端技術の展開により,現実のものとなってきた。空想のロボットのなかには人間と類似するものもあるが,実現可能なロボットは以下の点で人間とは本質的に異なるものである。人間は,自分のなかに自然発生する心の源泉をもち,これが外部の環境情報と相互に作用してこれまでの経験をもとに意思決定や判断などの営みをする。一方ロボットは,ハードな機械的部分はもちろんのこと,人間のソフトである心の源泉にあたるものを人間があらかじめデザインし,これを何らかの技術を用いて外部から組み込んだものである。したがって,人間がもつ心の思考の存在と,その発生のプロセスそのものが本質的に異なっていることを忘れてはならない。以下現代のロボットをいくつかに分け解説する。
一般に産業用ロボットというが,その定義,範囲などはあいまいである。産業用ロボットの主要な用途は工業である。そこでロボットは工作機械からの工具や加工製品の着脱,鋳造作業における高温物の運搬などに使われている。本項では以下でおもにこの工業用ロボットを中心に述べる。
ロボットの大半は先端に物をつかむ(あるいは吸着させる)ための手,もしくは溶接や塗装装置などをつけた機械の腕をもっており,人間から与えられた指示に従って腕を動かし作業を行っていくものである。腕は油圧やサーボモーターなどを動力としており,回転運動や水平・垂直運動の組合せで空間内の運動を可能にしている。
ロボットの制御方法はさまざまであるが,日本産業用ロボット工業会ではその方法を中心にロボットを以下のように分類している。
(1)マニュアルマニピュレーター 機械の腕を人間が直接操作するもの(マニピュレーター)。
(2)シーケンスロボット シーケンス制御とはあらかじめ定められた順序または条件に従って,制御対象の状態を逐次的に変化させることをいう。この制御をたとえば歯車やカムなどで設定してあり,その変更が容易でないものを固定シーケンスロボット,電子的な方法で記憶させるなどしてあり変更を容易にしたものを可変シーケンスロボットと呼ぶ。
(3)プレーバックロボット 人間がキーボードを使ったり,ロボットの腕をつかんで動かすことでその動作を記憶しそれを繰り返すもの。
(4)数値制御ロボット 腕の動きをコンピューターを使って数値化して与えるもの。
(5)知能ロボット 視覚,触覚などをもち,部品の位置などを判断して作業を行うもの。
自動制御や機械の腕に関する研究は古くからあるが,産業用ロボットの歴史はアメリカのディボルG.Devolが1954年に出した特許から始まるといわれる。このプレーバックロボットは58年に商品化された。60年代に入ると本格的な産業用ロボットが市販され,アメリカの自動車会社などで使用が開始された。一方日本でも,60年代初期に固定シーケンスロボットが開発されていたが,プレーバックロボットの生産は68年までまたねばならなかった。当初,その技術はアメリカやヨーロッパ諸国からの技術供給によるところが大きかったが,現在では世界一の産業用ロボットの生産・使用国になったといわれており,諸外国への技術供給も多い。
この間技術的には,腕の動作機構では簡単なものから,多数の関節をもつ動作の自由度の高いものが実現された。また重量物を運搬可能な大型のもの,あるいは人間の腕あるいは上半身と同等な小型のものへと幅が広がった。制御装置においても,マイクロプロセッサーの組込みが常識となり,ロボットを制御するためのロボット用言語や制御用ソフトウェアの開発も進んでいる。
工場以外でも宇宙,深海,原子炉内といった環境がきわめてきびしい状況下で使用する極限作業ロボットが開発されている。また第1次産業用として高木の下枝はらい用ロボット,魚釣りロボットなどが,第3次産業用としては,ビルの窓ふきロボット,盲導犬ロボット,看護介助ロボット,清掃ロボットなどが実用化ないしは開発されている。
知能ロボットは,人間の仕事を代行しうるロボットで,人工知能の研究成果を積極的にロボットづくりに導入したものである。〈人間の知能をどこまで工学的に実現しうるか〉という人工知能の研究は,1969年アメリカで第1回国際人工知能会議が開催されたことに始まる。
人間の知的な仕事のなかで,〈問題解決〉は大きな課題である。自己の能力で問題を把握し,それを解決することは,まさに人間の知的行為の最上位に属するものである。といって,すべてが高度なものではなく,人間にとってはやさしいが,機械にとっては困難なこと,たとえば,障害物を巧みによけながら移動したり,作業したり,ころがっている物体をつまみあげたり,人間の音声により忠実に作業するなどのことがある。とくに,人間の知的行為の基本には,みずからの作業環境や人体それ自身が構造化され,脳の中に立体地図として書き込まれている。対象に対するこうした空間的かつ立体的な構造化が,今後どこまで人工知能の技術で可能になるかが,知能ロボットの実現にとって大きな課題である。
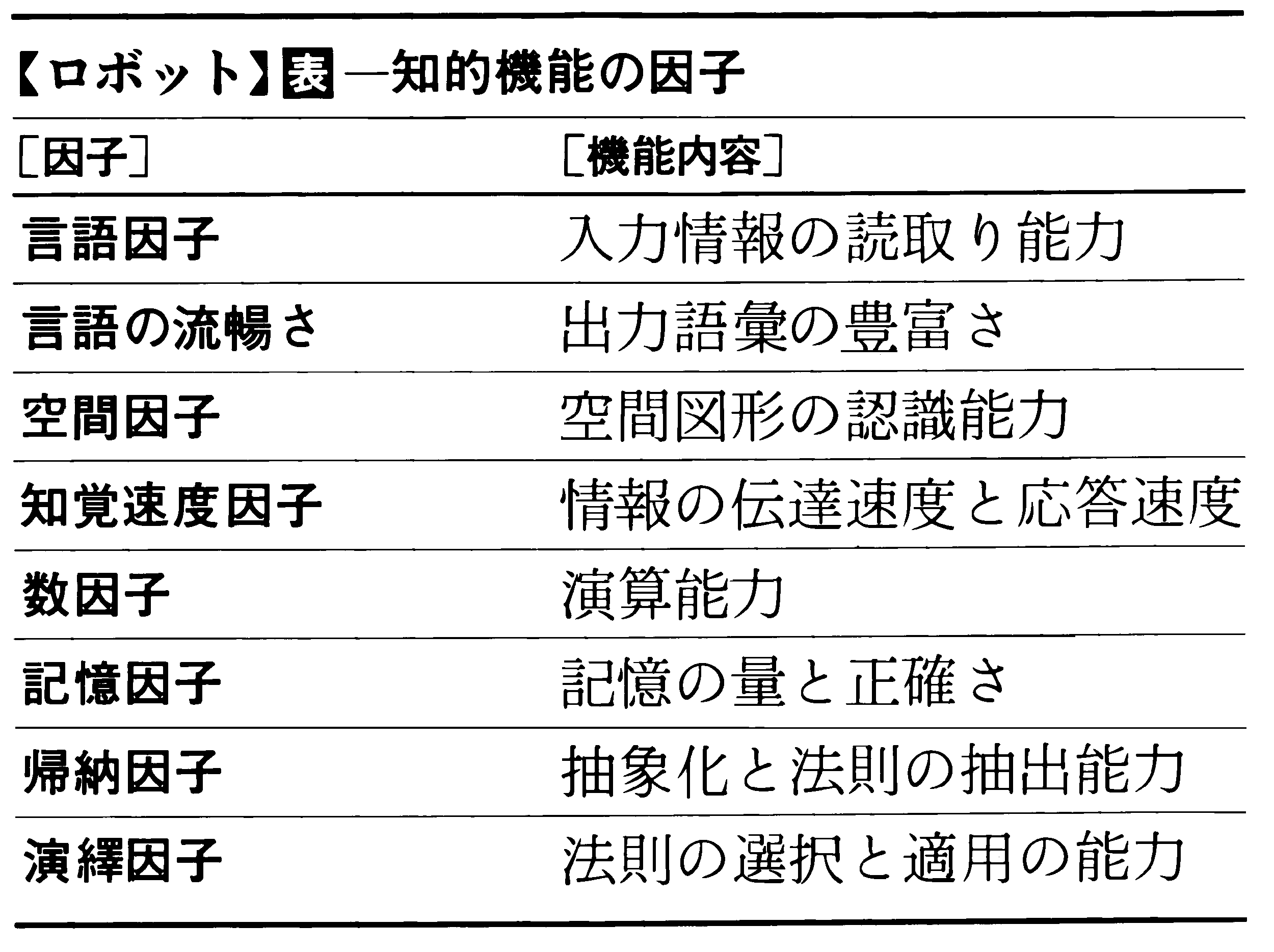
このことは,人間の五感のそれぞれの機能を工学的に実現するとともに,それぞれのかかわり合いで,さらに高度な機能をもたせることが重要である。ロボットの研究では古くから著名な,スタンフォード研究所のニルソンN.J.Nilssonは,解決すべき問題としてつぎの4項目を指摘している。(1)問題解決 人間が与えた仕事を成しとげる手順をロボットが独力で発見する能力をもつこと。(2)知識の表現 ロボットの作業現場の状態やその秩序,さらにこれまでの作業経験を知識として記憶し,それらを自由に活用する能力をもつこと。(3)感覚・パターン認識 周囲の状況を目,耳,触角などの感覚で立体的に認知する能力をもつこと。(4)自然言語処理 日本語,英語など人間の言葉の意味を理解し話す能力をもつこと。これらは,独立した機能ではなく,相互にかかわり合って人間の知的能力となるのである。さらに,人間の知的機能の因子とその工学的な状態を示すと,表のようになり,これらをうまく組み合せることにより知能ロボットが実現されるのである。
今まで述べてきたほかにもさまざまなロボットがつくられている。たとえば玩具としてのロボットは古くからつくられてきた。これらは歯車やカム機構など機械部品により運動を行うものであったが,1980年代に入りコンピューターを内蔵しプログラム可能なホビー用ロボットが市販されはじめた。ロボットの迷路脱出時間を競う競技会も開催されている。またロボットに関しさまざまな基礎研究が行われている。特に生物の運動を機械を使って再現する試みは活発であり,人間のように2本足で歩行するロボット,人間の手の指のような高度な動作を行うロボット,ヘビの運動を行うロボットなどさまざまなものが開発されている。
多くの生産工場では,労働者は危険で時として退屈な手作業を産業用ロボットが代行してくれることを歓迎している。オートメーションの進展とともにこの傾向は強まりつつあるが,先端技術といえどもその運用・管理は,ともすれば軽薄なまでに単純化され,そのため技術に対する人間としての感性のふれあいが,いまや失われつつあるのも事実である。このことを立証するかのように,時として生じる悲惨な大事故は,われわれに機械と人間のシステム上のギャップをまざまざと見せつけるのである。そこには,機械システムとその秩序をつくる人間と,それを運用・管理する側の人間とに大きな断絶がおこることを示すのである。ロボットの活路は,こうしたインターフェースの分野にこそあるが,技術的にまだまだ解決すべき多くの課題がある。とりわけ,現代社会での効率性や経済性などを考慮すると,ロボットの活躍する環境は制限されてくる。
こうしたなかで,ロボットもつぎつぎと研究開発され,人間の感覚機能や推論機能の一部を導入することも実現され,成果をあげつつある。そこで,ロボットの開発とその導入について,いくつかの問題点をあげてみよう。まず,開発については,メカトロニクスの部品を組み合わせるとともに,光技術の研究成果を導入し,それぞれの〈かかわり合い〉を重視した研究課題を設定する。たとえば,人間の〈生きている状態〉を総合的に把握し,それを技術的に実現する研究課題などがある。このことは総合的な光-メカトロニクスの技術をめざすことで,ソフトとハードの相互において,よりシステム化を促進することである。さらに,ロボットの社会への導入については,人間の生理学的かつ心理学的な側面はもちろんのこと,人間集団の文化的,社会的特性に注目し,人間の側からロボットによる作業環境と,その秩序づくりに努めることである。
ところで,機械文明の発祥の地であるヨーロッパでは,ロボットに対するそのイメージは日本とは異なり,文化的な演出の道具として人間の側からの接近がなされていた。したがって,今日でもロボットの産業界への導入は,それがすばらしい機械であればあるほど,技術の問題よりも人間の尊厳や労働者の地位が侵されるのではないか,という社会問題として受けとられ,注意深く見守られている。歴史的にも,労働者と機械との潜在的な葛藤は,古くからみられ,その顕著な例が1800年代初めイギリスでみられた機械破壊運動(ラッダイト運動)であった。つまり,産業革命の時期にイギリスの失業の脅威にさらされた手工業者,労働者たちが,最新の紡織機械の導入に対し,これらをつぎつぎと壊した事件である。こうした事実を直視するとき,単なる道具としての機械ではなく総合的な労働や仕事をこなす機械の出現,つまりロボットの登場に対し,われわれは産業界における効率化主義だけでなく,技術と人間,文化と技術とのかかわり合いを忘れてはならない。ロボット技術の急速な進歩は,社会に効率性や便利さと同時に,不安定要因をももたらすことを認識する必要がある。
執筆者:合田 周平
出典 株式会社平凡社「改訂新版 世界大百科事典」改訂新版 世界大百科事典について 情報
Sponsored by ![]()
出典 ブリタニカ国際大百科事典 小項目事典ブリタニカ国際大百科事典 小項目事典について 情報
Sponsored by ![]()
出典 株式会社平凡社百科事典マイペディアについて 情報
Sponsored by ![]()
…チェコ文学を代表する作家で新聞人。文学のあらゆるジャンルに名作を残した天才で,劇作品《R.U.R.(エルウーエル)》(通称《ロボット》1920)で世界的に有名になり,兄である画家のヨゼフJosef Čapek(1887‐1945)と共同で作ったロボット(人造人間)という語は世界中にひろまった。その作品のうち,この《R.U.R.》,《虫の生活》(1921),《マクロプロス事件》(1922)などの戯曲,ユニークな推理短編集《ひとつのポケットから出た語》(1929),園芸随筆《園芸家の十二ヵ月》(1922),童話《長い長いお医者さんの話》(原題《九つのおとぎ話》1932),SF長編《山椒魚(さんしよううお)戦争》(1936)などには邦訳がある。…
…(1)主として少年少女向けの娯楽としての冒険活劇やメルヘン風の小説,映画,テレビドラマ,漫画,演劇,音楽,玩具など。この方面では宇宙船やロボット,コスチュームなどの道具立てが重要な役割を果たしている。(2)主として科学技術の予測,計画,普及,およびそれにともなう社会科学的な考察,ユートピア論,文明史など。…
…ボーカンソンの精巧な音楽人形やジャケ・ドローズの歯車仕掛けで字や絵をかく自動人形は,当時の人々を驚嘆させ,いっぽうその自動機械の存在は哲学者デカルトやラ・メトリーに人間機械論を着想させた。さらに自動織機や計算機に結びついて,産業革命に手をかしていき,19世紀には怪奇な世界の登場人物として生き抜き,20世紀にはきまじめなロボットとして再生復活をくりかえしていく。 日本における自動機械つまり〈からくり〉は,いずれ中国伝来のものであったとおもわれ,中国では漢代に機械木人の話が伝えられており,正倉院御物の自動引出し付き碁盤はその名ごりといえよう。…
…チェコ文学を代表する作家で新聞人。文学のあらゆるジャンルに名作を残した天才で,劇作品《R.U.R.(エルウーエル)》(通称《ロボット》1920)で世界的に有名になり,兄である画家のヨゼフJosef Čapek(1887‐1945)と共同で作ったロボット(人造人間)という語は世界中にひろまった。その作品のうち,この《R.U.R.》,《虫の生活》(1921),《マクロプロス事件》(1922)などの戯曲,ユニークな推理短編集《ひとつのポケットから出た語》(1929),園芸随筆《園芸家の十二ヵ月》(1922),童話《長い長いお医者さんの話》(原題《九つのおとぎ話》1932),SF長編《山椒魚(さんしよううお)戦争》(1936)などには邦訳がある。…
…なお,インターネットの爆発的普及とともに,世界のどこにどのような情報があるのかを知ることは非常に難しくなっている。そこで,世界中のWWWの情報を定期的にロボットと呼ばれるソフトウェアで収集してデータベースを作成しておき,ユーザーがこのデータベースをキーワードで検索して所望の情報の場所を知ることができる検索サービスも提供されている。 WWWのような新しいサービスだけでなく,電子メールのような古典的なサービスも非常によく利用されている。…
※「ロボット」について言及している用語解説の一部を掲載しています。
出典|株式会社平凡社「世界大百科事典(旧版)」
Sponsored by ![]()
政府首脳が外国を訪問した際の会談内容や合意事項を記した外交文書。法的拘束力は持たないが,その内容は両国を事実上拘束する。類似のものに共同発表 joint statementがあるが,これはより記録的な...
7/28 化学辞典 第2版(森北出版)を更新
6/26 日本大百科全書(ニッポニカ)を更新
4/17 デジタル大辞泉プラスを更新
4/17 デジタル大辞泉を更新
2/17 日本大百科全書(ニッポニカ)を更新