動物の本質は前進運動locomotionにあるといえる。その点、植物は文字どおり地面に植わっていて、たとえば気温など、環境の好転をじっと待つばかりである。ところが動物はよりよい環境を求めて移動する。移動する手段として、身体内に前進運動器官をもつ。多くの陸棲脊椎(りくせいせきつい)動物の場合、それは四肢となる。四肢も使いようで、急ぐときには「走り」「跳ぶ」ことになるが、身体内のエネルギーを効率的・経済的に使用するには「歩く」のがもっともよい。歩くことは動物にとって日常生活上もっとも身近な行動様式であるといえよう。「這(は)えば立て、立てば歩めの親心」というが、私たちは「歩く」ということの意義をもっと深く知らねばなるまい。
人間は他の哺乳(ほにゅう)類と違い、歩く際、前肢に相当する手を用いず、直立二足歩行をするが、それはたいへんな冒険を試みているわけで、歩行中の一瞬は片足立ちをしていることになり、まさに一輪車をこいでいるのに等しい。それが可能になったのは、人間の神経、筋肉、感覚の機構が格段に発達するようになったからである。手は本来、前進運動器官であったわけであるが、人間の手は前進運動の負担から抜け出て、人間の意志を周囲に対して果たす積極的な器官と化した。歩くことは足に任せて、手はバランスをとるため前後に振られるが、それは次の仕事にとりかかる準備運動だともいえる。
同じ前進運動でも、人間が発明した車は、平面上では大いに威力を発揮するが、ひとたび岩場にかかると前進不能である。そこでは足に頼るほかはない。歩行中、足の着地に関して人は細心の注意を払い、不連続な傾斜面に安全な足場を選び、歩を進めるのである。障害物の多い地形を走ることはできないが、歩くことはできる。歩く際、人間そして動物はいとも簡単に足を前に出しているようにみえるが、実際には周到な注意が払われている。人間の歩行の歴史は霊長類のそれを引き継いでいるが、霊長類の歩運びは、平面と違い樹上生活で鍛えられたものであり、地上を歩く際は膝や腰がかなり曲がり、両膝は開き、足底の外側を地につけて歩く。横ゆれが著しく、長距離歩行に向かない。二本足で歩く人間の歩みは、この霊長類の歩運びをさらに生かしたものであり、腰や膝は伸び、両膝はあい近寄り、また強固に連結した足の小骨のアーチをばねとして、円滑かつ効率的に歩を進めるので、長距離歩行に適する。そのアーチに相当する部分が足裏に土ふまずをつくる。歩行は人間にとって不可欠なものであるが、運動不足になりがちな現代人にとっては、もっとも健康的な運動である。
[香原志勢]
「あるく」ということは人間にとってどういうことを意味するか、身近なことばのなかから探っていくと、古くから人間は、歩く動きをいくつかの面から言い分けていたようである。「あるく」の古語の「ありく」は、足を操る、足を操作するの意味で、それによって移り進むことを表す。「あゆぶ」も同じ内容をもつが、足を振るの意味である。また「あゆむ」は、移り進むことのほかに、足を読む、歩数を数えることをさした。13世紀初頭に書かれた鴨長明(かものちょうめい)の『方丈記』の一節には、「今、一身をわかちて、二つの用をなす。手の奴(やっこ)、足の乗り物、よくわが心にかなへり。心、身の苦しみを知れば、苦しむ時は休めつ、まめなれば使ふ。使ふとても、たびたび過ぐさず。(中略)いかにいはんや、つねに歩(あり)き、つねに働くは、養生なるべし」とある。
自分の思うように手足が動くのは、手は使用人で、足は体を運ぶ乗り物だからである。苦しいときは休ませ、達者であれば使うが、度を超してはいけない。しかし重要なことは、いつも歩き、働き続けることが、健康を保つために必要である、ということである。
鴨長明は、手足の主人は心と考え、心は頭と体(躯幹(くかん))にあるとしたのであり、足の乗り物というのは、体を移動する道具ということである。ほぼ780年前のこの指摘は、人間の行動を考えるうえからも興味深い。
ヒトは二本足で立って歩く。ヒトとよばれるための決定的な根拠の一つである。生まれるとすぐに立ち、歩くことのできる動物が多いのに対し、ヒトは立って歩くのに生後約1年、正常の歩行ができるようになるのにはさらに数年が必要である。その期間、幼児は休みなしに歩く努力をする。ヒトが歩くことのできる秘密を、一つ一つ考えていきたい。
[塚原 進]
いま生存する動物で、二足歩行をするものはヒトだけではない。鳥類も前肢が翼として分化したために歩行は完全に後肢の二足だけである。翼が弱いか、退化して飛ぶことができず、歩行だけとなった鳥もいる。また、トカゲのなかには後肢だけで走るものもいる。身体の前部を上方にあげ、尾でバランスをとる。カンガルーも同じだが、走るとき以外は、四足か、尾を含めた三足になっている。恐竜にも二足歩行のものがいたようであるが、静止しているときや、遅い歩行のときには、長い尾を使ったと想像される。
これらの二足動物は、ヒトのように歩行あるいは走行の途中で急に向きを変えることがうまくできない。そのかわり広い視野の目とよく動く長い頸(くび)をもっている。もう一つの共通点は、頭から尾にかけての重心の近くに足があることである。つまり長軸の中心に支点がある形となり、頭と尾でバランスをとれば、弥次郎兵衛(やじろべえ)のように、二足でも、あるいは一足でも立てるはずである。二足の場合には、2本の足の並んだ方向(左右)には安定で、前後の方向には不安定だからである。歩行やとくに走行の場合には、むしろ前方に重心を移し、前に倒れるような条件が必要である。そのためにできるだけ頸を伸ばして頭部を前方に突き出す形をとる。
[塚原 進]
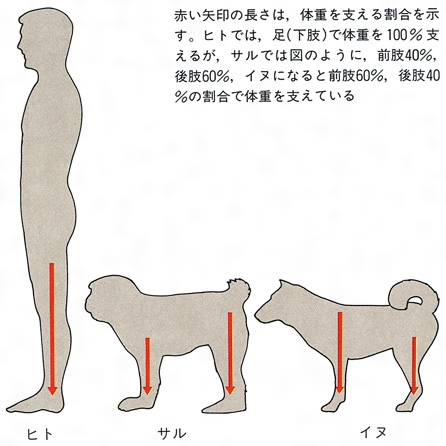
哺乳類ではどうであろうか。人間以外はほとんど四足歩行であるが、原猿類のインドリ、類人猿のテナガザルは、地上では二足で歩く。いずれも樹上の生活が主で、インドリなどは前肢(手)が後肢より著しく短く、テナガザルは前肢が長すぎる関係で、四足歩行をしようとすると、インドリは這(は)うようになってしまい、テナガザルは前肢がじゃまになるので、後肢で歩かざるをえない。これはむしろ例外であって、普通、哺乳類では鳥などに比べ、脳を含めた頭の部分の発達が著しく、前半身を支えるために前肢がどうしても必要となってくる。前肢ばかりでなく、肩も強くなければならないし、頸(けい)部も短く(キリンは例外)太くなっている。そのために頭部は鳥のように自由に動かすことはできない。そして重心は前方に移動する。一般に四足の哺乳類の体重を支える割合は前肢が約60%で後肢が40%だといわれている。ただ、高等なサルでは逆に後肢のほうにかかる割合が多くなっている。これは、頭を含めた前半身が、後半身より高く持ち上げられた姿勢をとるようになったためである(図A)。
[塚原 進]
ヒトが下肢だけで体重を支えることができるようになるのには、著しく脳が発達し、脊髄(せきずい)が頭蓋骨(ずがいこつ)の下面から出るようになったこと(ほかの動物では後ろまたは後ろ下面)、さらに脊柱(せきちゅう)がかなり自由に動くことができるようになって、上半身が直立のためにバランスをとりやすくなったことが関係している。そのほか骨盤や大腿(だいたい)骨、足の骨の形が直立二足歩行に適したようになり、一方、歩行から解放された上肢(両手)は下肢に比べ短くなり、手も足とはまったく違った形をとるようになる。
しかしヒトでも、幼児が直立二足歩行ができるまでの期間に、「這う」という形の四足歩行を行う。この這い方は成長の時期や個人による違いがあるが、肘(ひじ)を伸ばした上肢と膝(ひざ)による四つんばいは、動物の四足歩行に近い。もちろん成人でも低い姿勢で移動するときには意識して這うことができる。上肢と下肢の長さの違いで、この形をとらざるをえない。そのときの上下肢の動く順序は、一般の哺乳類と同じであるのは興味深い。成人でも、完成した二足歩行では両手を交互に振る。この両手(上肢)の振りは、直接、歩行には関係してはいない。足(下肢)が交互に動くために、身体の軸(脊柱)がそのたびにねじれるが、このねじれは、歩行時に上肢と下肢とを同時に逆に振ることによって補正される。この補正の効果によって頭の向きは安定してくる。これはねじれの方向だけでなく、前後・上下方向についても同じである。鳥も二足歩行だが、上肢の振りに相当するものがないので、鳥の歩行をみていると、頭を前後に動かすという運動で補正しているのがよくわかる。
ヒトの手(上肢)の振りを四足歩行の前肢の運動としてとらえてみると、四足歩行動物の歩行と比較できる。
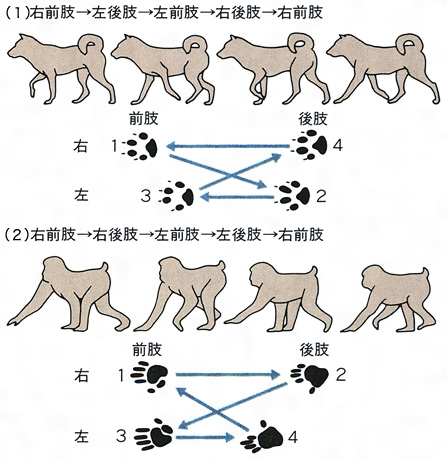
四つの肢(あし)を動かす順序は動物によって異なり、そのパターンは6種類に分けられる(図B)。
(1)右前肢→左後肢→左前肢→右後肢→右前肢、を繰り返すパターン。
(2)右前肢→右後肢→左前肢→左後肢→右前肢、を繰り返すパターン。(その他のパターンはここでは関係がないので省略する)
霊長類以外の哺乳類は(1)のパターン、霊長類は(2)のパターンであるという。乳児の這い這いは(1)、成人の歩行(両手を前肢と考えて)は(2)のパターンであるという。(1)のパターンをとるか、(2)のパターンをとるかは、体重を前肢で多く支えるか、後肢で多く支えるかによって決まるようである。乳児では当然のことながら相対的に頭が大きく、手(上肢)で支える重量のほうが大きい。このことについては前述したように、一般の哺乳類と同じである。それが、霊長類ではなかば立ち上がり、後肢で体重を支える割合が多くなるとともに、(2)のパターンとなる。ヒトでは下肢(後肢)が100%体重を支えるので、サルのように(2)のパターンになるものと考えられる。
[塚原 進]
新生児を両手で支え、少し前かがみの姿勢をとらせると、下肢を交互に動かして、一見、歩行運動のような形を示すことがある。この運動は「自動歩行」とか「自動運動」などといわれ、数週間はみられる(infantile automatism)。もちろん意識とは関係がない。この時期には、もう少し成長するとみられなくなるような反射運動があり、この自動歩行もそのような反射運動といっしょに消えてしまう。このときの下肢の動き方は大きく、手を振る動作はまったくない。
そして約1年後に支持歩行(つかまり歩き)から反復練習によりひとり歩きができるようになり、約1年半で走る(両足が床から離れる)ことができるようになる。この時期の歩行は成人とは完全に違っている。成人に比べ、体が前傾していること(中腰)、両足の間が広いこと、とくに両手を弥次郎兵衛(やじろべえ)のように両側にあげてバランスをとっていることなどである。そのため振り向いたり、歩行の方向を急に変えたりすることは、まだ下手である。
2年目の終わりごろに両足跳びができるようになり、3歳を過ぎて初めて思うように歩くことができる。成長に伴って筋力が増したことにもよるが、中枢神経系に、歩行のもっとも基本的なプログラムが形成されるためには、これだけの時間が必要なことになる。完全に成人歩行をするようになるのは7歳以上であるという。これは足の土ふまず(足弓)の形成と関係がある。
[塚原 進]
土ふまずは体重を支え、直立、歩行や跳躍のときに役だつ。土ふまずは前後の方向にも左右の方向にもある。つまり足の裏(足底)は、かかと、足底部の外側縁と5本の足指の付け根が弓状に曲がって、床面につくようになっている。土ふまずの部分はドーム状に浮き上がっていて、その頂上に下腿(かたい)の下端がのる(図C)。
ヒトが直立しているとき二足で立っているわけであるが、足底からみると2点で立っているのではなく、左右足底の二つの弓状の面で体を支えている。つまり、足底で床面についているのは、足底から土ふまずを除いた、いわば弓形に曲がっている部分である。しかも歩行のときには、機能的には足底の後部(かかと)と前部(つまさき)とは別々に働き、このことが二足歩行を可能にする。
かかとからつまさきまでを床や地面につける動物は少なく、サルなどは足底全面だが、イヌやネコなどは指とその付け根(ヒトの足底でいえばつまさき)、ウマやウシなどは指先である。ヒトの足底に似ているのはクマであるが、土ふまずはない。
[塚原 進]
足底からみると、ヒトの歩行は四足歩行と同じであるという実験を二つみていきたい。
実験Ⅰ 厚いガラス板に、小さなピラミッドをたくさん植え込んだゴム板を下向きにのせる。その上にヒトがのると、体重のかかった所のピラミッドの頂上がつぶれる。ガラス板のわきのほうから光を当てるとつぶれたピラミッドの頂上が光って見える。つぶれ方が大きいほど写真では白く見える(図D(1))。図D(2)は、そのような装置を使って、ヒトの歩行のときの足底が、どのように床につくかを写真に撮ったものである。写真では、時間は左から右へと経過している。
まず、かかとがつき、重心が前方に移動するにつれて、白い部分が前のほうに動いていくのがわかる。最後は、足の母指が床から離れる。かかとが体を支え、足の前部が床を蹴(け)って前進のエネルギーをつくっているのがわかる。つまり足底の働きとしては、同じ足の前部と後部とでは異なった役割を果たしている。このことを、発想を変えて、つまさきは前肢、かかとは後肢と考えたらどうだろうか。前述の歩行パターン分類でいえば、足の動く順序からみると明らかに(1)のパターンである。左後肢(左かかと)→左前肢(左つまさき)→右後肢(右かかと)→右前肢(右つまさき)→左後肢を繰り返すからである。両手を前肢ととらえるとすれば(2)のパターンであるが、足だけをみると(1)のパターンなのである。つまりヒトは、生後長い時間をかけて、下肢に前肢の働きを取り込んで、実際は二足なのだが、四足と同じ働きをする二足をもっていると考えることができる。
純粋に2点支持の二足の場合は、竹馬であろう。竹馬では、安定した直立を維持するためには、休みなしに動いていなければいけない。イヌのちんちんは、後肢で立っているわけであるが、じっとして立っていることはできない。ヒトでは、つまさきをあげ、かかとだけで立つことができるが、安定して立ち続けることはむずかしい。これがイヌのちんちんに相当する立ち方だということになる。
ヒトはまた、つまさきだけで立つこともできる。この場合は、かかと立ちよりははるかに安定しており、さらに片足つまさき立ちもできる。つまさき立ちは多点支持と考えられるからである。つまり、足底の前部の支持点は、母指球(足の母指の付け根部分)、小指球(小指の付け根部分)および母指(第1指)の底面の3点で形成される。両足つまさき立ちでは全部で6点で、いっそう安定するが、それぞれの3点のつくる三角形が小さいので、普通の直立よりは努力が必要である。
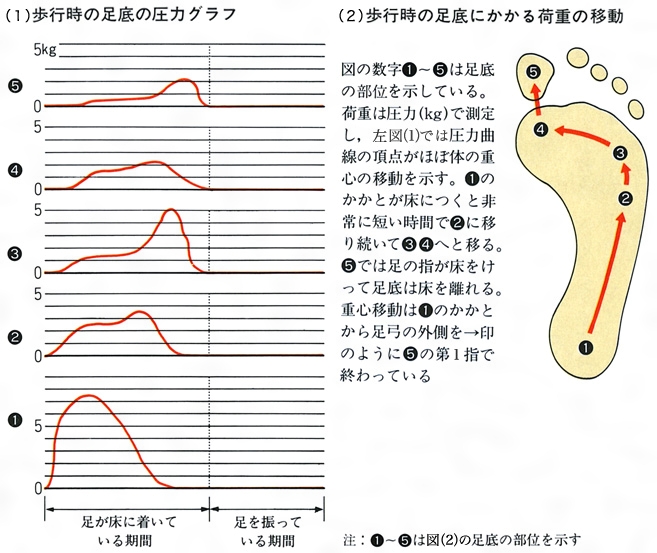
実験Ⅱ 図E(1)は、ヒトの歩行時の足底と床との間の圧力を測ったもので、かかととつまさきとが別々に働いていることがわかる。図D(2)と違うのは、それぞれが床につき離れるまでの経過がわかることである。まず、かかとが床につき、ついで重心は前方に移っていく。このようすは図D(2)からもわかるように、左のほうから、初めにかかと、次に足底の全面、続いてつまさき、指先の順序で写真の白い部分が変わっていく。もっともはっきりと白く表れている場所を重心の位置とすれば、それがかかとからつまさきに向かって移動している。これが図E(1)の曲線でも示されている。
このように、歩行時の足底と床の間の圧力を足底の数か所で測ってみると、図E(2)のように、初めはかかと、あとはつまさきに圧力の大部分がかかっていて足底全面が床についている時間は、かかとが床につき、つまさきが床から離れるまでの時間に比べると非常に短い。つまり、歩行を足底でみる限り、かかととつまさきの役割が大きい。したがって、かかととつまさきを分離している土ふまずの存在する意味が明らかになってくる。
このように、足底のかかととつまさきを分離して考えると、足指の付け根から母指までのつまさきの部分が、四足の動物の前肢に相当し、前進のために強く働いていることがわかる。
[塚原 進]
「あるく」の古語である「あゆぶ」は、足を振るの意であることは初めに触れた。足を振ることによって前進するからである。足(ももとすね)の振り方は、足(靴を履く部分)の動き方に比べると、はるかに単純で個人差も少ない。足の股関節(こかんせつ)と膝(しつ)関節の動き方を角度で測ってみると非常におもしろい。股関節は前方にも後方にも動くが、膝関節は後方にしか曲がらない。
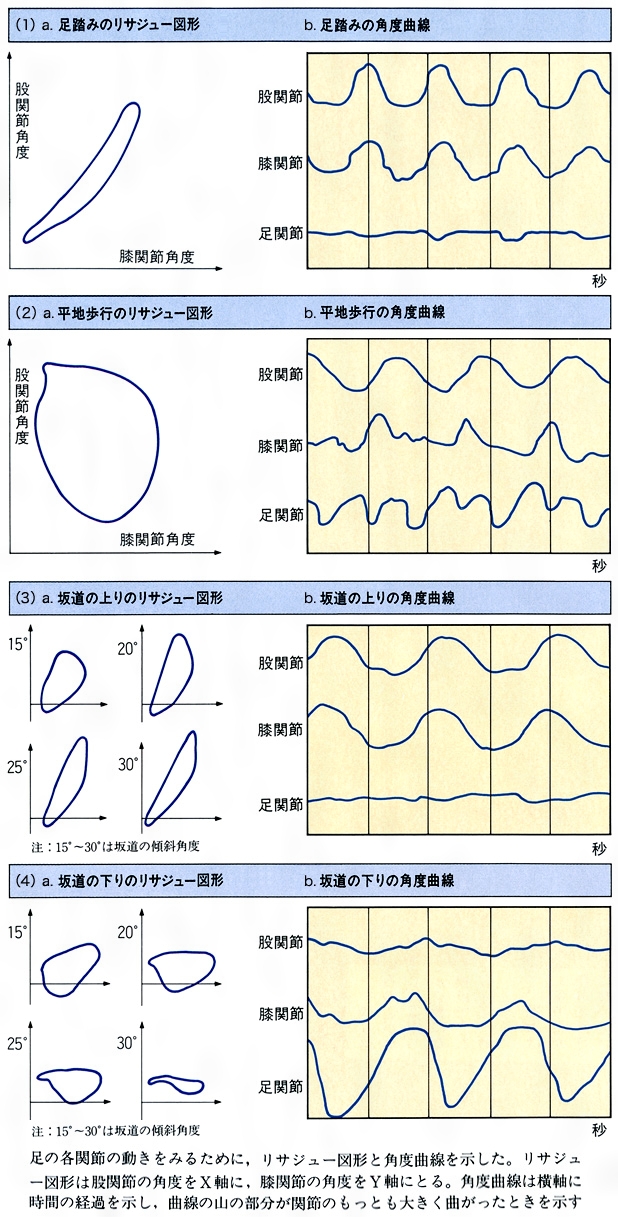
ところが足踏みのときには股関節は前方だけにしか動かない。二つの関節は、曲がるときも伸びるときも同時に動いている(図F(1)のb)。記録した二つの関節の角度曲線は平行している。そこで股関節の角度の変化をXY座標のX軸に、膝関節のをY軸に入れて、いわゆるリサジューの図形で表してみると、ほぼ直線になる(図F(1)のa)。原点に近いほうが二つの関節が伸びているときで、遠いほうが曲がっているときである。足踏みの1回ごとにこの二つの点を往復して、直線に近い線を描く。伸びたときには、直立と同じで、ほぼ一つの点にまとまっているが、実際には曲げ方が少しずつ違うので、数回の足踏みを行うと、原点から遠いほうの折り返し点がばらついて、きれいな直線にはならない。
[塚原 進]
歩き始めると、これらの関節の曲がり方が変わってくる。股関節は後方にも動いており、膝関節は股関節より早く曲がっている(図F(2)のb)。つまり股関節が少し前方に曲がったときに、膝(ひざ)が曲げられ、下腿が前方に大きく振り出され、足が床につく。そのときには膝は伸びているが、大腿は前に出されたままである。次に反対側の足が前方に振り出されて次の一歩が繰り返される。このときの角度の曲線をみると、曲線の山の部分が関節のもっとも大きく曲がったときを示し、その山の部分が、膝関節のほうが股関節の動きより前になっているのがわかる。山の形も、膝関節の動きのほうが鋭くなっていて、これは下腿が足踏みのときより速く動いていることを示す。歩行時の股・膝関節の動き方を、足踏みと同じようにリサジュー図形でみると、不正形の円となっている(図F(2)のa)。これは足踏みのときと違い、股関節と膝関節の曲がる時期がずれているためで、この円の大きさは、歩幅を大きくすれば大きくなる。
[塚原 進]
坂道、つまり傾いた場所を歩くときのリサジュー図形は、平地の場合と形が変わる。しかも形は、歩行面の傾き、つまり坂道で変わる。そして上りと下りとではまるで違う。上りでは急になるほど、股関節も膝関節も曲げるが、下りでは膝だけを曲げる。股関節はあまり動かさないが、そのかわり足関節が大きく動く。坂道の上りと下りのときの関節の角度曲線からも、これらの差異がよくわかる。
坂道の上りでは股・膝関節の両方が曲がり、膝関節の動き方は、平地の歩行のときに比べて、曲線の山の鋭さがみられない。このことから、膝関節に大きな力がかかっていることがわかる。足の関節はあまり動かない。足底を坂道の傾きと平行になるようにして上るからである(図F(3)のb)。下りでは股関節はあまり動かず、膝と足、とくに足の関節が大きく動いている。つまり小股(こまた)で歩いていることになる。足関節の動きの大きい理由は、かかとが地面についてから、つまさきがつくまでの角度が、下りのために大きくなるからである(図F(4)のb)。
[塚原 進]
平地の歩行での足関節の動き方は、坂道の歩行とはまったく異なり、1歩の間に2回曲がっている。これは、足を前に振り出すとき、床面をつまさきで蹴るときである。坂道では、上りはつまさきが主となり、下りではかかとが主となるような足の使い方のために、1回の動きとなるものと考えられる。
坂道の上りと下りのときの股・膝関節の角度変化のリサジュー図形を図F(3)のa、図F(4)のaに示す。左から15度、20度、25度、30度の坂で、(3)が上り、(4)が下りである。上りは縦長に、下りは横長になっている。上りでは急になるほど股関節の動きが大きく、下りでは小さくなる。股関節の動きは曲線が横の基線より高いほど前方に大きく、横の基線より下は後方に動いていることを意味する。下りでは傾きが大きくなると、大腿を後ろのほうに振らなくなっている。このような足の使い方は実際に坂道を上り下りしてみると、よく理解できる。リサジュー図形で表してみると、足踏みでは図形の包む面積はほとんどない。平地歩行では、変形ではあるが円形をつくる。この面積は、歩行のときの歩幅を大きくすれば、それだけ股関節や膝関節の動きが大きくなるので、円も大きくなり面積も増す。したがってリサジュー図形の意味は、面積が大きくなるほど一歩の前進量が大きいことを意味する。図形に表された形は、歩き方と関係があるということが理解できる。
このような股、膝、足の三つの関節を、地面や床面の状況によって使い分けているので、そのためには多数の筋肉をどんな順序で、どんな強さで働かせるかを決めておく必要がある。これは一種のプログラムであるといっていい。これには、小脳を主として、脊髄(せきずい)や、脳の他の部分も関与している。完全な歩行ができるようになるまで、長い時間を必要とするわけである。
[塚原 進]
現在、乗り物は足ではなしに機械化され、人々は自分の足で歩かなくなった。このことは、遠からず、長い距離をある速さでもって歩くことのできかねる人が増すであろうことを予見させる。
ここで「初め四本足、次に二本足、最後は三本足となるものは何か」という有名なスフィンクスの謎(なぞ)を思い出していただきたい。人の歩行は幼児の「這(は)い這い」に始まる。やがて二本足の成人の歩行となることをこれまでに書いた。そして老後は杖(つえ)をついて歩くようになり、この杖も足と数えて三本足となるのが人の歩行の一生の経過だというのが、この謎の答えらしい。
しかし現在では、老人はかならずしも杖はつかない。むしろ視覚に障害のある人が用いており、老人でも歩行に障害のある場合と、いわゆる腰や背中の曲がった人しか杖をつかないであろう。
杖は一般に1本の棒である。杖としての使い方も単純で、一方の端に近いところを手で握り、他端を床や地面につける。そして歩行の一歩のある時期に体重を杖にかける。足を前方に動かしやすくするためである。普通は片手で杖を握り、他の手は腰に置く。杖を握っているために、手を振ることができないからである。杖は、足の力の不足を「手で補う」ための道具であるといえる。手が足を助けるのは杖ばかりでなく、階段や屋上にある手すりも同じである。階段の場合にはとくに必要である。足を助けるばかりでなく転ぶことも防ぐ。
いずれにしても老人は脚力が低下する。この傾向は昔から変わっていない。上肢の力を握力、脚力を垂直跳びの大きさで年齢別に測ってみると、65歳以上では急に握力と垂直跳びの差が大きくなるという。杖や手すりは、この衰えた脚力を、残った上肢の力で補う意味がある。
この傾向を少なくする、つまり脚力の低下を少なくすることが、老後の生活を支配するといっても過言ではない。そのためには、散歩とかジョギングとかを意識的に続けることがもっとも有効である。老人の運動、とくに下肢の運動不足は、足や腰の痛みをおこす。運動を続けた老人では、関節の変形がおこっても痛みはほとんどないということが、はっきりしているのである。
[塚原 進]